Reductie (kegelsnede)
De reductie van een kegelsnede behelst het draaien en/of verschuiven van het xy-assenkruis zodat de vergelijking van de kegelsnede tot een eenvoudige en herkenbare standaardvorm wordt herleid. Eerst wordt indien nodig de rotatie uitgevoerd, een bewerking die gebaseerd is op eigenwaarden en eigenvectoren. Daarna volgt als tweede stap een verschuiving van het geroteerde assenkruis. Door dezelfde bewerkingen te gebruiken in drie dimensies kan op analoge manier een kwadriek gereduceerd worden naar een standaardvorm.
Matrixvergelijking van een kegelsnede
De algemene vergelijking van een kegelsnede is van de vorm:

waarbij a, b en c niet alle drie nul zijn. Indien de coëfficiënt b niet nul is bevat de vergelijking een xy-term en zal een rotatie van het assenkruis nodig zijn om deze te verwijderen. Indien b nul is is geen rotatie vereist. Bovenstaande vergelijking kan in matrixvorm geschreven worden als:

of nog korter:

met:

De matrix A, die de informatie van de tweedegraadstermen bevat, toont nu waarom de xy-coëfficiënt in de algemene vergelijking als 2b werd geschreven. Op die manier kan die 2b gelijkmatig worden verdeeld over de twee niet-diagonaalelementen van de matrix, die daardoor symmetrisch wordt.
Rotatie van het assenkruis
Een symmetrische matrix heeft een aantal belangrijke eigenschappen:
- Hij is steeds diagonaliseerbaar.
- Alle eigenwaarden zijn reëel.
- Eigenvectoren van verschillende eigenwaarden zijn orthogonaal (loodrecht).
- Bij meervoudige eigenwaarden kan nooit ontaarding optreden. Dit heeft hier tot gevolg dat, zelfs indien de twee eigenwaarden van A gelijk zijn, het steeds mogelijk is twee lineair onafhankelijke, en dus orthogonaliseerbare, eigenvectoren te vinden.
In alle gevallen kunnen er dus twee orthogonale eigenvectoren gevonden worden, die vervolgens na normering zelfs orthonormaal zijn.
Deze eigenschap wordt gebruikt om de rotatie concreet uit te voeren. Stel dat de matrix A twee eigenwaarden heeft, en , met respectievelijke orthonormale eigenvectoren en . De matrix P met als kolommen deze eigenvectoren is dan een orthogonale matrix die A diagonaliseert, met de matrix D als diagonaalvorm. D is een diagonaalmatrix met op de hoofddiagonaal de eigenwaarden in dezelfde volgorde als de eigenvectoren op de kolommen van P. Daarbij moet de zin van de orthonormale eigenvectoren zodanig gekozen worden dat de determinant van P gelijk aan 1 is, zodat de rotatie de rechtshandigheid van het assenkruis bewaart. Een eigenvector waarvan men de zin omdraait blijft steeds een eigenvector van dezelfde eigenwaarde zodat deze eventuele aanpassing steeds mogelijk is.






Gezien P een orthogonale matrix is, bestaat zijn inverse en is die gelijk aan de getransponeerde van P. De eerste kolom bevat de richting van de x'-as uitgedrukt in het xy-assenkruis. De tweede kolom bevat de richting van de y'-as uitgedrukt in het xy-assenkruis. Door nu op drie plaatsen in de matrixvergelijking de eenheidsmatrix in de vorm in te voeren verkrijgt men:


Indien men vervolgens stelt:

bekomt men:

of voluit geschreven:

Hieruit blijkt dat de kruiselingse term in x.y verdwenen is door de coördinaatstransformatie. Meetkundig betekent de rotatie van het assenkruis dat de assen zodanig gedraaid worden dat een van beide evenwijdig is aan de hoofdas van de kegelsnede, en de andere as er loodrecht op staat. De figuur horend bij het voorbeeld (zie verder) toont dit effect. Door de rotatie zullen in het algemeen wel de eventueel aanwezige lineaire coëfficiënten gewijzigd worden.
Aard van de kegelsnede
De aarde van de kegelsnede kan aan de hand van de determinant van de matrix A bepaald worden:

Voor een ellips is deze positief, voor een hyperbool negatief en voor een parabool nul. Bij een ellips hebben beide eigenwaarden dus hetzelfde teken, bij een hyperbool een tegengesteld teken, en bij een parabool is één eigenwaarde nul.
Verschuiving van het assenkruis
Een verschuiving is nodig indien:
- een onbekende x' of y' na rotatie nog zowel kwadratisch als lineair voorkomt
- een onbekende voorkomt samen met een constante term f (dit kan optreden bij een parabool)
Deze twee voorwaarden dienen in deze volgorde toegepast te worden.
- In het eerste geval kan de lineaire term worden opgeheven op volgende manier, uitgelegd op een getalvoorbeeld:

Eerst wordt de kwadratische coëfficiënt (2) voorop gezet. Vervolgens wordt binnen de haakjes het kwadraat van de helft van de daar aanwezige lineaire term toegevoegd (9), en wordt deze toevoeging buiten de haakjes weer tenietgedaan (−18). Tussen de haakjes staat nu een merkwaardig product dat als één kwadraat kan worden geschreven. De verschuiving is dan:

De lineaire term is dus verdwenen door de verschuiving. Op dezelfde manier kan een term in y' weggeschoven worden door een analoge verschuiving in de y-richting.
- In het tweede geval wordt de constante term gewoon opgenomen in de nog resterende lineaire term. Bijvoorbeeld:

Na deze bewerkingen staat de vergelijking van de kegelsnede in een standaardvorm.
- Voor een ellips met halve lange as a:

of

- Voor een hyperbool:

of

- Voor een parabool:

of

Gezien tijdens de berekening een aantal keuzes moeten gemaakt worden, zoals bijvoorbeeld de nummering van de eigenwaarden, is de gereduceerde vergelijking niet uniek. Echter, bij elke keuze bekomt men ook telkens een ander xy-assenkruis, en dit compenseert het verschil in formule.
Voorbeeld
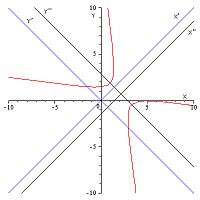
De kegelsnede K:

heeft als matrixvorm:

Aan de determinant van A, die negatief is, is te zien dat dit een hyperbool voorstelt. De twee eigenwaarden zullen dus verschillend van nul zijn, met tegengesteld teken. De eigenwaarden met hun respectievelijke genormeerde eigenvectoren zijn:


De rotatiematrix P en de diagonaalvorm D zijn dus:

Na rotatie wordt de kegelsnede:

Voor elke kwadratische term is nog steeds ook een lineaire term aanwezig, en dus dient er verschoven te worden zowel in x' als in y'. Na vorming van de merkwaardige producten wordt dit:

en ten slotte, na verschuiving:

Een mogelijke gereduceerde vorm is dus:

Dit is een hyperbool die in het x"y"-assenkruis op de y"-as ligt. De toppen liggen in dit assenkruis in (0,±3/5) en de brandpunten in (0,±1).
Andere vorm van reductie
Bij een hyperbool kan ook een asymptoot als y-as gekozen worden, en de oorsprong weer op het snijpunt van de asymptoten. De gereduceerde vorm is dan
