Crewed Mars rover




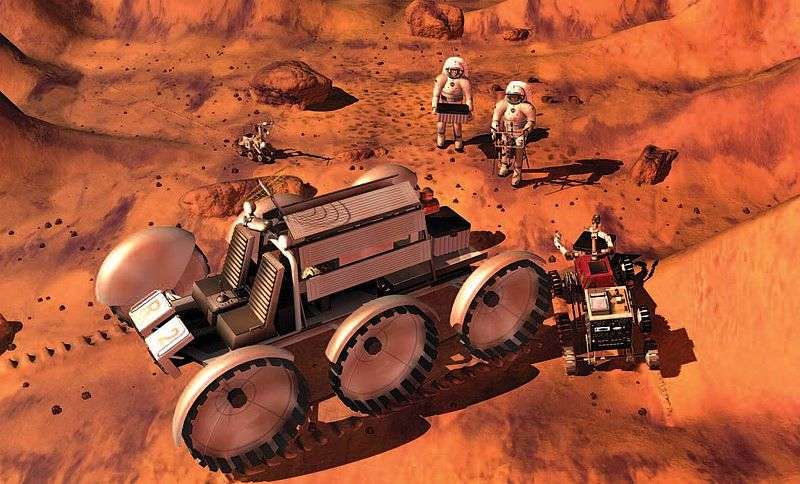
Crewed Mars rovers are vehicles for transporting people on the planet Mars, and have been conceptualized as part of human mission to that planet.[1][3] Two types of crewed Mars rovers are pressurized and unpressurized—unpressurized designs may have open seating for a crew in Mars space suits, and another style has a pressurized interior for people to work without a space suit.[3] Pressurized rovers have been envisioned for short trips from a Mars base, or they may be equipped to be more of a mobile base or laboratory.[3] They are also called manned Mars rovers[4]
Crewed Mars rovers are a component of many designs for a human mission to the planet Mars.[1] For example, the Austere Human Missions to Mars proposal proposed including two rovers on its unmanned power and logistics cargo lander.[1] Each rover could hold a crew of two in a pressurized environment, with power coming from a Stirling radioisotope generator.[1]
Examples
Mars One, a Mars colonization plan intended to be funded by a TV show, plans an unpressurized crewed rover capable of traveling 80 km (50 miles).[5] They said a possible supplier was Astrobotic Technology.
The Manned Mars Exploration Rover (MMER) won a design award in 2010.[6] Some features included live-aboard capability, a winch, airlock, and six foam core wheels.[6] It featured modular construction so it could be assembled from smaller parts, and the suggested power source was radioisotope batteries.[6] An example of RTG use is the Cassini-Huygens spacecraft whose radioisotope power system produces several hundred watts of electrical power.[7]
It produces this amount power continuously with a slow decline over decades, and with even larger amount of heat production at the same time.[7] The electricity is produced from the heat given off by radioactive decay.[7]
In 2017, the Park Brother's Concepts debuted their Mars Rover design, which featured a six-wheel design, enclosed cab, and a mobile laboratory concept.[8] The rover concept is a Non-NASA design, but did debut at the Kennedy Space Center's Summer of Mars and is back dropped by agencies goal of getting humans to Mars by the early 2030s.[8] Car and Driver magazine reported on this event, and dubbed it a 'Mars Car' noting the designers and various specifications of the vehicle such as its size.[4]
An example of an in-house NASA design for rover, is the wheeled version of the Space Exploration Vehicle, which can has a version for outer space.[8][9] An early version of the SEV rover was tested in 2008 by NASA in the desert.[9] The SEV for space or roving missions was designed to support two humans for 14-days, and would include a toilet, sleeping logistics, and one version has suitports to support EVAs.[9][10]Another concept is a windows that allow looking at objects very close to the front of the rover but on surface (down and to the front).[9]
In the 1960s, the post-Mariner 4 design for a Mars Excursion Module, by Marshall Space Flight Center, including a cargo version carrying a pressurized Mobile Laboratory for Mars, called MOLAB.[11] One of the ideas for Molab was for it touch down on its wheels, what was called a "rover first" concept.[3] MOLAB had a pressurized cylinder for crews to operate in a shirt-sleeve environment even on a extraterrestrial surface.[3]
Navigation
For options for keeping track of location as the rover moves around Mars include:[12]
- Topographic cues from images
- Inertial measurements (see also Inertial measurement unit)
- A Mars GPS if emplaced
- Celestial navigation
Navigation on Mars is noted as important issue for human missions to the planet.[12] Celestial navigation, used for over 500 years on Earth, may provide a way of locating on the Mars surface to within about 100 meters (109 yards).[12] Navigation is especially relevant to rovers, because they need to know at least roughly where they are and where they are going to get to a destination.[13] Dead reckoning was the method used by the Mars Pathfinder rover Sojourner for navigation.[13]
A GPS satellite network for Mars would mean a constellation of satellites in Mars orbit, but one alternative would be a surface based pseudo-satellites array.[13] These devices would have to be emplaced with high precision, unless they were self-calibrating.[13]
Rover design



An example of criteria for humaned Mars surface rover was expressed by NASA in the surface variant of the aforementioned SEV, in development in during the 2010s.[14] The 1980s era Case for Mars design suggest a medium range rover with two compartments, one which could be de-pressurized and opened up to the Mars atmosphere, and a driving compartments which could remain pressurized during this time.[15] The same study also suggested a bigger long duration rover with tracks and robotic arms, in addition to other types in that Mars surface human mission concept.[16]
Airlock design, especially for EVA is a an area of study for pressurized rovers.[14]
Design ideas for crewed and/or pressurized rovers:[14]
- Docking Hatch a docking hatch would allow connecting to a Mars surface habitat, ascent stage, or other rover, allowing the passage of people in a pressurized thru-way after docking
- Suit port an integrated combining of the rover with a Mars suit design, allowing a person to enter a Mars suit that has an opening connected to the pressuized interior of the rover, yet the rest of suit exterior to the Mars environment. This would avoid having a separate air-lock or to depressurize the whole vehicle when opening a exterior hatch
- Modular design this a design concept that would mean making components of the rover able to be swapped for other components in convenient way or dissembled into smaller sections. For example, a rover might able to be broken down it smaller pieces that are assembled on the surface after being landed on the surface of Mars. This would allow making a bigger rover for any given limit to deliver a certain mass to the surface of Mars intact.
- Chariot piloting station this is a place for a Mars-suited astronaut to control the rover without having to re-enter pressurized area
- Ice-shield-Heat sink one idea is to have a 2.5 cm barrier of Ice as shielding, and this ice could also be used as a heat sink

Additional possible technologies:
- Fuel Cells and/or High Energy Density Batteries
- Regenerative Brake
- Wheels
- Light-Weight Structures and Materials
- Active Suspension
- Avionics and Software
- Extravehicular Activity (EVA) support
- Thermal Control Systems (see also Spacecraft thermal control)
- Automated Rendezvous and Docking (see also docking and berthing of spacecraft)
A 2004 analysis of a human Mars surface mission suggested the following types of rovers:[17]
In human Mars missions, rovers are sometimes grouped under what have been called "mars surface elements".:[17]
Unpressurized rover
See also
- Electra (radio) (commonly used spacecraft radio at Mars)
- Human mission to Mars
- Johnson Sea Link (a submersible with a clear sphere for viewing)
- Lunar Roving Vehicle (Manned rover of Apollo missions, used on Moon in 1970s)
- Mars habitat
- Mars rover
- Mars suit (e.g. Mars space suit)
- Rocker-bogie (suspension design used on NASA Mars rovers to-date)
- Space Exploration Vehicle
References
- 1 2 3 4 5 Price, Hoppy; Hawkins, Alisa; Radcliffe, Torrey (16 September 2009). "Austere Human Missions to Mars" (PDF). NASA. Archived from the original (PDF) on 6 February 2010. Retrieved 22 September 2018.
- ↑ "Liftoff for Aurora: Europe's first steps to Mars, the Moon and beyond". ESA. Retrieved 22 September 2018.
- 1 2 3 4 5 Zakrajsek, James J., et. al. (2005). "Exploration Rover Concepts and Development Challenges" (PDF). NASA. Retrieved 22 September 2018.
- 1 2 Fink, Greg (7 June 2017). "Mars Car: Manned Mars Rover Concept Debuts at Kennedy Space Center". Car and Driver. Archived from the original on 18 July 2018. Retrieved 22 September 2018.
- ↑ "Mission Feasibility". Mars One. Retrieved 6 August 2013.
- 1 2 3 "Manned Mars Rover wins Good Design Award". Dexigner. 13 February 2010. Retrieved 22 September 2018.
- 1 2 3 Barber, Todd J. (23 August 2010). "Insider's Cassini: Power, Propulsion, and Andrew Ging". Cassini Solstice Mission. Archived from the original on 2 April 2012. Retrieved 20 August 2011.
- 1 2 3 Vasquez, Robert. "Mars Car: Manned Mars Rover Concept Debuts at Kennedy Space Center". robertvasquez123.wordpress.com. Retrieved 25 February 2018.
- 1 2 3 4 "Multi-Mission Space Exploration Vehicle". NASA. Retrieved 25 February 2018.
- ↑ Orwig, Jessica (5 January 2016). "I drove the 6,600-lb 'car' that NASA designed for astronauts on Mars, and I'll never see space exploration the same way again". Business Insider. Retrieved 25 February 2018.
- ↑ Portree, David S. F. (25 October 2012). "Origin of the Apollo-shaped Manned Mars Lander (1966)". WIRED. Retrieved 4 March 2018.
- 1 2 3 Malay, Benjamin P. (2001). "Celestial Navigation on the Surface of Mars". United States Naval Academy. Retrieved 22 September 2018.
- 1 2 3 4 "Mars Rover Navigation Using GPS Self-Calibrating Pseudolite Arrays". Stanford Aerospace Robotics Lab. 1 November 2010. Retrieved 7 March 2018.
- 1 2 3 "Space Exploration Vehicle Concept" (PDF). NASA. 2010. Retrieved 22 September 2018.
- ↑ "Figure 3. Medium-range rover depicting two astronauts recovering..." ResearchGate. Retrieved 17 August 2018.
- ↑ "Figure 4. Long-range rover with a complex multi-week life support..." ResearchGate. Retrieved 17 August 2018.
- 1 2 Hunt, Charles D.; van Pelt, Michel O. (2004). "Comparing NASA and ESA Cost Estimating Methods for Human Missions to Mars" (PDF). NASA. Retrieved 22 September 2018.
External links
- Novak, Matt (30 July 2012). "Wernher von Braun's Martian Chronicles". Smithsonian.
- "James Cameron's rover". bp.blogspot.
- "Home". Human Mars.net.
- Perez-Davis, Marla E.; Faymon, Karl A. (1987). "Mars Manned Transportation Vehicle" (PDF). NASA.
- Wade, Mark. "DRM 1 Mars Rover - Pressurized". Astronautix.com.
{kind=link}
Further reading
| 21st-century proposals |  | |
|---|---|---|
| 20th-century proposals | ||
| Mars analogs (list) | ||
| Advocacy | ||
| Hardware concepts | ||
| Miscellaneous | ||