Linear independence
In the theory of vector spaces, a set of vectors is said to be linearly dependent if at least one of the vectors in the set can be defined as a linear combination of the others; if no vector in the set can be written in this way, then the vectors are said to be linearly independent. These concepts are central to the definition of dimension.[1]

A vector space can be of finite-dimension or infinite-dimension depending on the number of linearly independent basis vectors. The definition of linear dependence and the ability to determine whether a subset of vectors in a vector space is linearly dependent are central to determining a basis for a vector space.
Definition
A sequence of vectors from a vector space V is said to be linearly dependent, if there exist scalars , not all zero, such that



where denotes the zero vector.

Notice that if not all of the scalars are zero, then at least one is non-zero, say , in which case this equation can be written in the form


Thus, is shown to be a linear combination of the remaining vectors.

A sequence of vectors is said to be linearly independent if the equation


can only be satisfied by for . This implies that no vector in the sequence can be represented as a linear combination of the remaining vectors in the sequence. In other words, a sequence of vectors is linearly independent if the only representation of as a linear combination of its vectors is the trivial representation in which all the scalars are zero.[2] Even more concisely, a sequence of vectors is linear independent if and only if can be represented as a linear combination of its vectors in a unique way.



The alternate definition, that a sequence of vectors is linearly dependent if and only if some vector in that sequence can be written as a linear combination of the other vectors, is only useful when the sequence contains two or more vectors. When the sequence contains no vectors or only one vector, the original definition is used.
Infinite dimensions
In order to allow the number of linearly independent vectors in a vector space to be countably infinite, it is useful to define linear dependence as follows. More generally, let V be a vector space over a field K, and let {vi | i ∈ I} be a family of elements of V indexed by the set I. The family is linearly dependent over K if there exists a non-empty finite subset J ⊆ I and a family {aj | j ∈ J} of elements of K, all non-zero, such that

A set X of elements of V is linearly independent if the corresponding family {x}x∈X is linearly independent. Equivalently, a family is dependent if a member is in the closure of the linear span of the rest of the family, i.e., a member is a linear combination of the rest of the family. The trivial case of the empty family must be regarded as linearly independent for theorems to apply.
A set of vectors which is linearly independent and spans some vector space, forms a basis for that vector space. For example, the vector space of all polynomials in x over the reals has the (infinite) subset {1, x, x2, ...} as a basis.
Geometric meaning
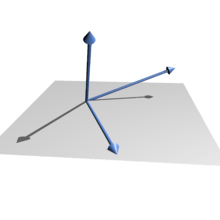
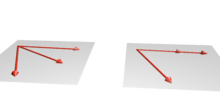
A geographic example may help to clarify the concept of linear independence. A person describing the location of a certain place might say, "It is 3 miles north and 4 miles east of here." This is sufficient information to describe the location, because the geographic coordinate system may be considered as a 2-dimensional vector space (ignoring altitude and the curvature of the Earth's surface). The person might add, "The place is 5 miles northeast of here." Although this last statement is true, it is not necessary.
In this example the "3 miles north" vector and the "4 miles east" vector are linearly independent. That is to say, the north vector cannot be described in terms of the east vector, and vice versa. The third "5 miles northeast" vector is a linear combination of the other two vectors, and it makes the set of vectors linearly dependent, that is, one of the three vectors is unnecessary.
Also note that if altitude is not ignored, it becomes necessary to add a third vector to the linearly independent set. In general, n linearly independent vectors are required to describe all locations in n-dimensional space.
Evaluating linear independence
Vectors in R2
Three vectors: Consider the set of vectors v1 = (1, 1), v2 = (−3, 2) and v3 = (2, 4), then the condition for linear dependence seeks a set of non-zero scalars, such that

or

Row reduce this matrix equation by subtracting the first row from the second to obtain,

Continue the row reduction by (i) dividing the second row by 5, and then (ii) multiplying by 3 and adding to the first row, that is

We can now rearrange this equation to obtain

which shows that non-zero ai exist such that v3 = (2, 4) can be defined in terms of v1 = (1, 1), v2 = (−3, 2). Thus, the three vectors are linearly dependent.
Two vectors: Now consider the linear dependence of the two vectors v1 = (1, 1), v2 = (−3, 2), and check,

or

The same row reduction presented above yields,

This shows that ai = 0, which means that the vectors v1 = (1, 1) and v2 = (−3, 2) are linearly independent.
Vectors in R4
In order to determine if the three vectors in R4,

are linearly dependent, form the matrix equation,

Row reduce this equation to obtain,

Rearrange to solve for v3 and obtain,

This equation is easily solved to define non-zero ai,

where a3 can be chosen arbitrarily. Thus, the vectors v1, v2 and v3 are linearly dependent.
Alternative method using determinants
An alternative method relies on the fact that n vectors in are linearly independent if and only if the determinant of the matrix formed by taking the vectors as its columns is non-zero.

In this case, the matrix formed by the vectors is

We may write a linear combination of the columns as

We are interested in whether AΛ = 0 for some nonzero vector Λ. This depends on the determinant of A, which is

Since the determinant is non-zero, the vectors (1, 1) and (−3, 2) are linearly independent.
Otherwise, suppose we have m vectors of n coordinates, with m < n. Then A is an n×m matrix and Λ is a column vector with m entries, and we are again interested in AΛ = 0. As we saw previously, this is equivalent to a list of n equations. Consider the first m rows of A, the first m equations; any solution of the full list of equations must also be true of the reduced list. In fact, if 〈i1,...,im〉 is any list of m rows, then the equation must be true for those rows.

Furthermore, the reverse is true. That is, we can test whether the m vectors are linearly dependent by testing whether

for all possible lists of m rows. (In case m = n, this requires only one determinant, as above. If m > n, then it is a theorem that the vectors must be linearly dependent.) This fact is valuable for theory; in practical calculations more efficient methods are available.
More vectors than dimensions
If there are more vectors than dimensions, the vectors are linearly dependent. This is illustrated in the example above of three vectors in R2.
Natural basis vectors
Let V = Rn and consider the following elements in V, known as the natural basis vectors:

Then e1, e2, ..., en are linearly independent.
Proof
Suppose that a1, a2, ..., an are elements of R such that

Since

then ai = 0 for all i in {1, ..., n}.
Linear independence of basis functions
Let be the vector space of all differentiable functions of a real variable . Then the functions and in are linearly independent.




Proof
Suppose and are two real numbers such that



Take the first derivative of the above equation such that

for all values of t. We need to show that and . In order to do this, we subtract the first equation from the second, giving . Since is not zero for some t, . It follows that too. Therefore, according to the definition of linear independence, and are linearly independent.



Space of linear dependencies
A linear dependency or linear relation among vectors v1, ..., vn is a tuple (a1, ..., an) with n scalar components such that

If such a linear dependence exists with at least a nonzero component, then the n vectors are linearly dependent. Linear dependencies among v1, ..., vn form a vector space.
If the vectors are expressed by their coordinates, then the linear dependencies are the solutions of a homogeneous system of linear equations, with the coordinates of the vectors as coefficients. A basis of the vector space of linear dependencies can therefore be computed by Gaussian elimination.
See also
- Matroid – Abstract structure that models and generalizes linear independency
References
- G. E. Shilov, Linear Algebra (Trans. R. A. Silverman), Dover Publications, New York, 1977.
- Friedberg, Insel, Spence, Stephen, Arnold, Lawrence. Linear Algebra. Pearson, 4th Edition. pp. 48–49. ISBN 0130084514.CS1 maint: multiple names: authors list (link)
External links
- Hazewinkel, Michiel, ed. (2001) [1994], "Linear independence", Encyclopedia of Mathematics, Springer Science+Business Media B.V. / Kluwer Academic Publishers, ISBN 978-1-55608-010-4
- Linearly Dependent Functions at WolframMathWorld.
- Tutorial and interactive program on Linear Independence.
- Introduction to Linear Independence at KhanAcademy.
| Basic concepts |
|  |
|---|---|---|
| Vector algebra |
| |
| Multilinear algebra |
| |
| Matrices |
| |
| Algebraic constructions |
| |
| Numerical |
| |
| ||