Stappenmotor
Een stappenmotor is een borstelloze, synchrone elektromotor, waarvan de hoekverdraaiing nauwkeurig te beheersen is, bijvoorbeeld in stappen van 1,8 graden. De rotor bevat permanente magneten; de stator is opgebouwd uit elektromagneten.



De hoge resolutie wordt bereikt door zowel de stator als de rotor van een hoog aantal polen te voorzien, zodanig dat zij geen gemeenschappelijke factor bezitten. Telkens als een wikkeling bekrachtigd wordt, komt een pool in de rotor recht tegenover een pool in de stator te staan, waardoor de rotor een klein stukje draait. Door naast elkaar gelegen wikkelingen gelijktijdig en verschillend te bekrachtigen (meestal door middel van pulsbreedtemodulatie) kan een nog hogere resolutie worden bereikt.
De belangrijkste karakteristieke eigenschap van een stappenmotor is het koppel dat hij bij stilstand kan leveren, daarom kan een stappenmotor als standrem fungeren.
Types
Permanente magneet
De rotor en stator van deze motor zijn meestal niet getand. De rotor heeft een noord- en een zuidkant. Door een fase te activeren ontstaat er een elektromagnetische kracht en zal de rotor zich uitlijnen met de bekrachtigde fase. Om de stapresolutie van een permanente magneetstappenmotor te vergroten, kan men het aantal polen in de stator of het aantal fasen verhogen of de uitgaande as van de motor voorzien van een tandwielvertraging.
Variabele reluctantie
Een variabele reluctantie stappenmotor heeft een getande, niet magnetische rotor. Wanneer een fase wordt bekrachtigd beweegt de rotor zich naar de plaats met de kleinste reluctantie (minimum reluctantie). Om de resolutie te verhogen bij een variabele reluctantiestappenmotor kan men het aantal tanden in de rotor of het aantal polen verhogen.
Hybride
Een hybride stappenmotor is een combinatie tussen de twee voorgaande typen. De rotor is magnetisch en getand, ook de polen van de stator zijn getand. De vertanding in de stator is opgedeeld in twee verschillende zones, één zone voor noordpolen en één voor zuidpolen. Ze zijn dus tegenpolig, ook staan de zuidpolen ‘tussen’ de noordpolen. De rotor zal bij het bekrachtigen van een fase verplaatsen naar de positie met het minste plaats tussen de tanden van de rotor en de tanden van de stator. De hybride stappenmotor wordt tegenwoordig het meest gebruikt.
Windingstypes
Unipolaire type
De unipolaire stappenmotor bezit twee wikkelingen met elk een middenaftakking en heeft dus zes aansluitingen. De middenaftakkingen (common) worden permanent aan één kant van de voedingsspanning aangesloten. In sommige gevallen zijn beide common-aansluitingen samengenomen en heeft de motor vijf aansluitingen. De vier andere aansluitingen worden door de besturing steeds wel of niet met het andere eind van de spanning verbonden. Op deze wijze worden hoogstens twee halve wikkelingen tegelijk bekrachtigd, zodat op enig gegeven moment minstens de helft van de wikkelingen ongebruikt blijft. Daardoor is een compacte bouw niet mogelijk. Het voordeel is echter de relatief eenvoudige besturing; er zijn maar vier vermogenstransistoren nodig. Met de komst van de hoog-geïntegreerde elektronica is dit echter niet langer een economisch voordeel; dit type motor raakt in onbruik.
Bipolaire type
De bipolaire stappenmotor bezit twee wikkelingen zonder middenaftakking en heeft dus vier aansluitingen. Tegenwoordig is dit het gangbare type. De wikkelingen worden in beide richtingen bekrachtigd en moeten daarom elk in een transistorbrugschakeling geplaatst worden.
Besturing
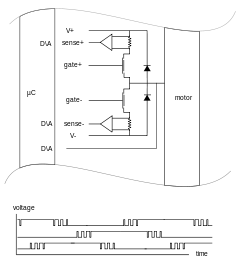
Net als een synchrone wisselspanningsmotor wordt de stappenmotor in het ideale geval aangestuurd met zuivere sinusvormige stromen. Hierdoor wordt een vloeiende beweging mogelijk, maar dit is bezwaarlijk voor de besturing; een analoge vermogensschakeling geeft hoge verliezen. In de praktijk wordt vaak een digitale aansturing, die gebruikmaakt van pulsbreedtemodulatie, gebruikt. Eenvoudiger besturingen maken slechts één puls per stap. Hierbij moet een stroombegrenzer de stroom binnen de perken houden.
Toepassingen
De stappenmotor wordt veel gebruikt in positioneringssystemen, met name als onderdeel van een servosysteem. Voorbeelden van toepassingen zijn:
- diskettestations
- scanners
- printers
- plotters
- harde schijven
- cd-spelers
- robotarmen