Spacebit Mission One
Spacebit Mission One is a planned first robotic UK's lunar mission designed by the privately held company Spacebit in collaboration with Yuzhnoye Design Buro to deliver Asagumo moon rover[2][3] to the surface of the Moon. The launch is scheduled for July 2021[4]
| Mission type | Lunar lander, rover |
|---|---|
| Operator | Spacebit |
| Spacecraft properties | |
| Manufacturer | Spacebit |
| Start of mission | |
| Launch date | July 2021[1] |
| Rocket | Vulcan |
| Contractor | United Launch Alliance (ULA) |
| Moon lander | |
| Spacecraft component | Rover |
| Landing date | TBD |
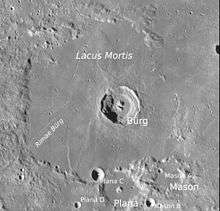
| Landing site | Lacus Mortis |
Spacebit Mission One would demonstrate a new lunar exploration technology related to lunar lava tube's for sustainable lunar exploration.[5][6]
Overview
By February 2019, Astrobotic's first lunar lander mission, simply called Mission One, had 14 commercial payloads including small rovers from Hakuto, Team AngelicvM,[7] and a larger rover from the Carnegie Mellon University named Andy that has a mass of 33 kg and is 103 cm tall.[8] An unusual miniature rover (1.3 kg) called Asagumo is included, and it moves on four legs.[9][10] It is a technological demonstrator and will travel a distance of at least 10 m (33 ft).
In September 2019, Spacebit signed an agreement to deliver the first UK's lunar rover Asagumo on upcoming mission in 2021 and named this "Spacebit Mission One".[12][13][14]
On November 18, 2019, Spacebit and Ukraine's Yuzhnoye Design Buro have unveiled a new Lunar Lander-Hopper prototype at the Dubai Airshow, while also announcing the UAE as the official testing location for a Spider Moon Rover—"the smallest robotic Moon rover in the world with legs."
The lander will be developed over the next two to three years with engine testing starting earlier, according to Spacebit, while the Spider Moon Rover is in development and is due to be launched formally in Q2 2020. The precise testing location in Abu Dhabi has yet to be identified.[15][16]
"Our Lunar Lander is different as it incorporates the ability to 'hop' from one landing site to another," said Spacebit CEO Pavlo Tanasyuk. It will be designed to deliver "150 kg or more of payload" to one landing point or "50 kg or more" to up to three remote landing points on the lunar surface within a distance of up to 20 km, said Spacebit.[17]

The pint-sized robotic lander, weighing just 1.3kg, will hitch a ride aboard a NASA-funded mission to the cratered lunar surface. Equipped with four legs rather than wheels or tracks, the rover will be able to explore parts of the moon other landers cannot reach.[19][20]
The plan is to land their Astrobotic's Peregrine lander next to a pit located in the Lacus Mortis plain, then circumnavigate the pit with a rover, while a micro-rover called Asagumo (developed by Spacebit) enters the pit,[17][15] that is thought to offer access to the lava tubes suspected to exist below the surface.[21][16][11]
See also
References
- Firstpost •Jan 27; Ist, 2020 08:55. "Spacebit 3: ISRO starts work on second lander mission to the moon, launch planned in early 2021- Technology News, Firstpost". Firstpost. Retrieved 2020-01-28.CS1 maint: numeric names: authors list (link)
- October 2019, Mike Wall 12. "UK's 1st Moon Rover to Launch in 2021". Space.com. Retrieved 2020-03-02.
- Clark, Stuart (2019-10-17). "Spacewatch: UK's first moon rover poised for 2021 touchdown". The Guardian. ISSN 0261-3077. Retrieved 2020-03-02.
- Clark, Stuart (2019-10-17). "Spacewatch: UK's first moon rover poised for 2021 touchdown". The Guardian. ISSN 0261-3077. Retrieved 2020-02-01.
- Spacebit Mission One: UK's 1st Moon Rover to Launch in 2021, retrieved 2020-02-01
- Hoggins, Tom (2019-10-10). "UK to send 'walking' spider robot to the moon in its first lunar rover mission". The Telegraph. ISSN 0307-1235. Retrieved 2020-02-01.
- "Astrobotic ready to become delivery service to the Moon". SpaceFlight Insider. 2018-03-19. Retrieved 2020-02-01.
- "CMU | Lunar". 2015-02-03. Archived from the original on 2015-02-03. Retrieved 2020-02-01.
- "Britain's first moon rover is a four-legged robot that will explore lunar tunnels". NBC News. Retrieved 2020-02-01.
- "Tiny walking rover bound for the moon". Reuters. 2019-10-10. Retrieved 2020-02-01.
- 3D Printed structure of Lacus Mortis pit crater with assumption of a cave underneath. Ik-Seon Hong, Eunjin Cho, Yu Yi, Jaehyung Yu, Junichi Haruyama. 2nd International Planetary Caves Conference (2015).
- "Astrobotic Awarded $79.5 Million Contract to Deliver 14 NASA Payloads to the Moon | Astrobotic". www.astrobotic.com. Retrieved 2020-01-28.
- "Spacebit to unveil the UK's first Lunar Lander-Hopper at the Dubai Airshow 2019 – India Strategic". Retrieved 2020-01-28.
- "Astrobotic and Spacebit Announce Agreement to Bring the First UK Commercial Payload to the Moon | Astrobotic". www.astrobotic.com. Retrieved 2020-01-28.
- Sheppard, Ian. "UK Lunar Lander Will Be Tested in UAE". Aviation International News. Retrieved 2020-02-01.
- "Spacebit to unveil the UK's first Lunar Lander-Hopper at the Dubai Airshow 2019 – India Strategic". Retrieved 2020-02-01.
- Sheppard, Ian. "UK Lunar Lander Will Be Tested in UAE". Aviation International News. Retrieved 2020-02-01.
- Sheppard, Ian. "UK Lunar Lander Will Be Tested in UAE". Aviation International News. Retrieved 2020-02-01.
- "SpaceBit moon rover set to land on lunar surface in 2021". Sky News. Retrieved 2020-02-01.
- Browne, Ryan (2019-10-10). "Britain's first moon rover is a tiny four-legged robot that will launch into space by 2021". CNBC. Retrieved 2020-02-01.
- "3D Modeling of Lacus Mortis Pit Crater with Presumed Interior Tube Structure." Journal of Astronomy and Space Science 32(2); Pages: 113-120; June 2015. doi:10.5140/JASS.2015.32.2.113