Gray code
The reflected binary code (RBC), also known just as reflected binary (RB) or Gray code after Frank Gray, is an ordering of the binary numeral system such that two successive values differ in only one bit (binary digit).
| Lucal code[1][2] | |||||
|---|---|---|---|---|---|
| 5 | 4 | 3 | 2 | 1 | |
| Gray code | |||||
| 4 | 3 | 2 | 1 | ||
| 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 1 | 1 |
| 2 | 0 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 0 | 1 |
| 4 | 0 | 1 | 1 | 0 | 0 |
| 5 | 0 | 1 | 1 | 1 | 1 |
| 6 | 0 | 1 | 0 | 1 | 0 |
| 7 | 0 | 1 | 0 | 0 | 1 |
| 8 | 1 | 1 | 0 | 0 | 0 |
| 9 | 1 | 1 | 0 | 1 | 1 |
| 10 | 1 | 1 | 1 | 1 | 0 |
| 11 | 1 | 1 | 1 | 0 | 1 |
| 12 | 1 | 0 | 1 | 0 | 0 |
| 13 | 1 | 0 | 1 | 1 | 1 |
| 14 | 1 | 0 | 0 | 1 | 0 |
| 15 | 1 | 0 | 0 | 0 | 1 |
For example, the representation of the decimal value "1" in binary would normally be "001" and "2" would be "010". In Gray code, these values are represented as "001" and "011". That way, incrementing a value from 1 to 2 requires only one bit to change, instead of two.
Gray codes are widely used to prevent spurious output from electromechanical switches and to facilitate error correction in digital communications such as digital terrestrial television and some cable TV systems.
Name
Bell Labs researcher Frank Gray introduced the term reflected binary code in his 1947 patent application, remarking that the code had "as yet no recognized name".[3] He derived the name from the fact that it "may be built up from the conventional binary code by a sort of reflection process".
The code was later named after Gray by others who used it. Two different 1953 patent applications use "Gray code" as an alternative name for the "reflected binary code";[4][5] one of those also lists "minimum error code" and "cyclic permutation code" among the names.[5] A 1954 patent application refers to "the Bell Telephone Gray code".[6] Other names include "cyclic binary code", "cyclic progression code",[7][8] "cyclic permutating binary"[9] or "cyclic permutated binary" (CPB).[9][10][11]
Motivation
Many devices indicate position by closing and opening switches. If that device uses natural binary codes, positions 3 and 4 are next to each other but all three bits of the binary representation differ:
| Decimal | Binary |
|---|---|
| ... | ... |
| 3 | 011 |
| 4 | 100 |
| ... | ... |
The problem with natural binary codes is that physical switches are not ideal: it is very unlikely that physical switches will change states exactly in synchrony. In the transition between the two states shown above, all three switches change state. In the brief period while all are changing, the switches will read some spurious position. Even without keybounce, the transition might look like 011 — 001 — 101 — 100. When the switches appear to be in position 001, the observer cannot tell if that is the "real" position 001, or a transitional state between two other positions. If the output feeds into a sequential system, possibly via combinational logic, then the sequential system may store a false value.
The reflected binary code solves this problem by changing only one switch at a time, so there is never any ambiguity of position:
| Decimal | Binary | Gray |
|---|---|---|
| 0 | 0000 | 0000 |
| 1 | 0001 | 0001 |
| 2 | 0010 | 0011 |
| 3 | 0011 | 0010 |
| 4 | 0100 | 0110 |
| 5 | 0101 | 0111 |
| 6 | 0110 | 0101 |
| 7 | 0111 | 0100 |
| 8 | 1000 | 1100 |
| 9 | 1001 | 1101 |
| 10 | 1010 | 1111 |
| 11 | 1011 | 1110 |
| 12 | 1100 | 1010 |
| 13 | 1101 | 1011 |
| 14 | 1110 | 1001 |
| 15 | 1111 | 1000 |
The Gray code for decimal 15 rolls over to decimal 0 with only one switch change. This is called the "cyclic" property of a Gray code. In the standard Gray coding the least significant bit follows a repetitive pattern of 2 on, 2 off ( … 11001100 … ); the next digit a pattern of 4 on, 4 off; the n-th least significant bit a pattern of on off.

More formally, a Gray code is a code assigning to each of a contiguous set of integers, or to each member of a circular list, a word of symbols such that no two code words are identical and each two adjacent code words differ by exactly one symbol. These codes are also known as unit-distance,[12][13][14][8][15] single-distance, single-step, monostrophic[16][17][15] or syncopic codes,[16] in reference to the Hamming distance of 1 between adjacent codes. In principle, there can be more than one such code for a given word length, but the term Gray code was first applied to a particular binary code for non-negative integers, the binary-reflected Gray code, or BRGC, the four-bit version of which is shown above.
History and practical application
Reflected binary codes were applied to mathematical puzzles before they became known to engineers. Martin Gardner wrote a popular account of the Gray code in his August 1972 Mathematical Games column in Scientific American. The French engineer Émile Baudot used Gray codes in telegraphy in 1878.[18] He received the French Legion of Honor medal for his work. The Gray code is sometimes attributed, incorrectly,[19] to Elisha Gray.[20][21][22]
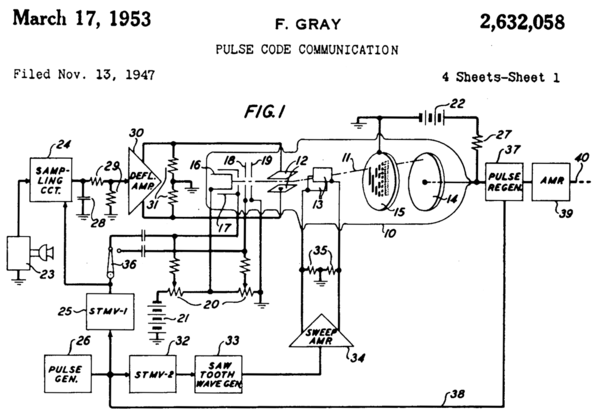
Frank Gray, who became famous for inventing the signaling method that came to be used for compatible color television, invented a method to convert analog signals to reflected binary code groups using vacuum tube-based apparatus. The method and apparatus were patented in 1953 and the name of Gray stuck to the codes. The "PCM tube" apparatus that Gray patented was made by Raymond W. Sears of Bell Labs, working with Gray and William M. Goodall, who credited Gray for the idea of the reflected binary code.[23]
Gray was most interested in using the codes to minimize errors in converting analog signals to digital; his codes are still used today for this purpose.
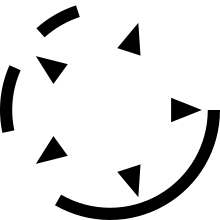
Position encoders
.svg.png)

Gray codes are used in linear and rotary position encoders (absolute encoders and quadrature encoders) in preference to weighted binary encoding. This avoids the possibility that, when multiple bits change in the binary representation of a position, a misread will result from some of the bits changing before others.
For example, some rotary encoders provide a disk which has an electrically conductive Gray code pattern on concentric rings (tracks). Each track has a stationary metal spring contact that provides electrical contact to the conductive code pattern. Together, these contacts produce output signals in the form of a Gray code. Other encoders employ non-contact mechanisms based on optical or magnetic sensors to produce the Gray code output signals.
Regardless of the mechanism or precision of a moving encoder, position measurement error can occur at specific positions (at code boundaries) because the code may be changing at the exact moment it is read (sampled). A binary output code could cause significant position measurement errors because it is impossible to make all bits change at exactly the same time. If, at the moment the position is sampled, some bits have changed and others have not, the sampled position will be incorrect. In the case of absolute encoders, the indicated position may be far away from the actual position and, in the case of incremental encoders, this can corrupt position tracking.
In contrast, the Gray code used by position encoders ensures that the codes for any two consecutive positions will differ by only one bit and, consequently, only one bit can change at a time. In this case, the maximum position error will be small, indicating a position adjacent to the actual position.
Mathematical puzzles
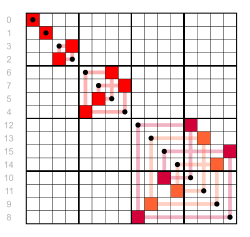
The binary-reflected Gray code can serve as a solution guide for the Towers of Hanoi problem, as well as the classical Chinese rings puzzle, a sequential mechanical puzzle mechanism.[19] It also forms a Hamiltonian cycle on a hypercube, where each bit is seen as one dimension.
Genetic algorithms
Due to the Hamming distance properties of Gray codes, they are sometimes used in genetic algorithms. They are very useful in this field, since mutations in the code allow for mostly incremental changes, but occasionally a single bit-change can cause a big leap and lead to new properties.
Boolean circuit minimization
Gray codes are also used in labelling the axes of Karnaugh maps[24][25] as well as in Händler circle graphs,[26][27][28][29] both graphical methods for logic circuit minimization.
Error correction
In modern digital communications, Gray codes play an important role in error correction. For example, in a digital modulation scheme such as QAM where data is typically transmitted in symbols of 4 bits or more, the signal's constellation diagram is arranged so that the bit patterns conveyed by adjacent constellation points differ by only one bit. By combining this with forward error correction capable of correcting single-bit errors, it is possible for a receiver to correct any transmission errors that cause a constellation point to deviate into the area of an adjacent point. This makes the transmission system less susceptible to noise.
Communication between clock domains
Digital logic designers use Gray codes extensively for passing multi-bit count information between synchronous logic that operates at different clock frequencies. The logic is considered operating in different "clock domains". It is fundamental to the design of large chips that operate with many different clocking frequencies.
Cycling through states with minimal effort
If a system has to cycle through all possible combinations of on-off states of some set of controls, and the changes of the controls require non-trivial expense (e.g. time, wear, human work), a Gray code minimizes the number of setting changes to just one change for each combination of states. An example would be testing a piping system for all combinations of settings of its manually operated valves.
A balanced Gray code can be constructed,[30] that flips every bit equally often. Since bit-flips are evenly distributed, this is optimal in the following way: balanced Gray codes minimize the maximal count of bit-flips for each digit.
Gray code counters and arithmetic
A typical use of Gray code counters is building a FIFO (first-in, first-out) data buffer that has read and write ports that exist in different clock domains. The input and output counters inside such a dual-port FIFO are often stored using Gray code to prevent invalid transient states from being captured when the count crosses clock domains.[31] The updated read and write pointers need to be passed between clock domains when they change, to be able to track FIFO empty and full status in each domain. Each bit of the pointers is sampled non-deterministically for this clock domain transfer. So for each bit, either the old value or the new value is propagated. Therefore, if more than one bit in the multi-bit pointer is changing at the sampling point, a "wrong" binary value (neither new nor old) can be propagated. By guaranteeing only one bit can be changing, Gray codes guarantee that the only possible sampled values are the new or old multi-bit value. Typically Gray codes of power-of-two length are used.
Sometimes digital buses in electronic systems are used to convey quantities that can only increase or decrease by one at a time, for example the output of an event counter which is being passed between clock domains or to a digital-to-analog converter. The advantage of Gray codes in these applications is that differences in the propagation delays of the many wires that represent the bits of the code cannot cause the received value to go through states that are out of the Gray code sequence. This is similar to the advantage of Gray codes in the construction of mechanical encoders, however the source of the Gray code is an electronic counter in this case. The counter itself must count in Gray code, or if the counter runs in binary then the output value from the counter must be reclocked after it has been converted to Gray code, because when a value is converted from binary to Gray code, it is possible that differences in the arrival times of the binary data bits into the binary-to-Gray conversion circuit will mean that the code could go briefly through states that are wildly out of sequence. Adding a clocked register after the circuit that converts the count value to Gray code may introduce a clock cycle of latency, so counting directly in Gray code may be advantageous.US3020481
To produce the next count value in a Gray-code counter, it is necessary to have some combinational logic that will increment the current count value that is stored. One way to increment a Gray code number is to convert it into ordinary binary code, add one to it with a standard binary adder, and then convert the result back to Gray code.[32] Other methods of counting in Gray code are discussed in a report by Robert W. Doran, including taking the output from the first latches of the master-slave flip flops in a binary ripple counter.[33]
Gray code addressing
As the execution of program code typically causes an instruction memory access pattern of locally consecutive addresses, bus encodings using Gray code addressing instead of binary addressing can reduce the number of state changes of the address bits significantly, thereby reducing the CPU power consumption in some low-power designs.[34][35]
Constructing an n-bit Gray code
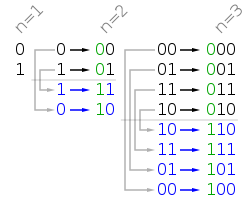
The binary-reflected Gray code list for n bits can be generated recursively from the list for n − 1 bits by reflecting the list (i.e. listing the entries in reverse order), prefixing the entries in the original list with a binary 0, prefixing the entries in the reflected list with a binary 1, and then concatenating the original list with the reversed list.[19] For example, generating the n = 3 list from the n = 2 list:
| 2-bit list: | 00, 01, 11, 10 | |
| Reflected: | 10, 11, 01, 00 | |
| Prefix old entries with 0: | 000, 001, 011, 010, | |
| Prefix new entries with 1: | 110, 111, 101, 100 | |
| Concatenated: | 000, 001, 011, 010, | 110, 111, 101, 100 |
The one-bit Gray code is G1 = (0, 1). This can be thought of as built recursively as above from a zero-bit Gray code G0 = ( Λ ) consisting of a single entry of zero length. This iterative process of generating Gn+1 from Gn makes the following properties of the standard reflecting code clear:
- Gn is a permutation of the numbers 0, …, 2n − 1. (Each number appears exactly once in the list.)
- Gn is embedded as the first half of Gn+1.
- Therefore, the coding is stable, in the sense that once a binary number appears in Gn it appears in the same position in all longer lists; so it makes sense to talk about the reflective Gray code value of a number: G(m) = the m-th reflecting Gray code, counting from 0.
- Each entry in Gn differs by only one bit from the previous entry. (The Hamming distance is 1.)
- The last entry in Gn differs by only one bit from the first entry. (The code is cyclic.)
These characteristics suggest a simple and fast method of translating a binary value into the corresponding Gray code. Each bit is inverted if the next higher bit of the input value is set to one. This can be performed in parallel by a bit-shift and exclusive-or operation if they are available: the nth Gray code is obtained by computing . Prepending a 0 leaves the order of the code words unchanged, prepending a 1 reverses the order of the code words. If you invert the bits at position of codewords, you flip (or reverse) the order of neighbouring blocks of codewords. E.g. if you invert bit 0 in a 3 bit codeword sequence, you flip the order of two neighbouring codewords



{000,001,010,011,100,101,110,111} -> {001,000,011,010,101,100,111,110} (invert bit 0)
If you invert bit 1, blocks of 2 codewords change order:
{000,001,010,011,100,101,110,111} -> {010,011,000,001,110,111,100,101} (invert bit 1)
If you invert bit 2, blocks of 4 codewords reverse order:
{000,001,010,011,100,101,110,111} -> {100,101,110,111,000,001,010,011} (invert bit 2)
Thus, ex-oring a bit at position with the bit at position leaves the order of codewords intact if , and reverses the order of blocks of codewords if . Now, this is exactly the same operation as the reflect-and-prefix method to generate the Gray code.






A similar method can be used to perform the reverse translation, but the computation of each bit depends on the computed value of the next higher bit so it cannot be performed in parallel. Assuming is the th Gray-coded bit ( being the most significant bit), and is the th binary-coded bit ( being the most-significant bit), the reverse translation can be given recursively: , and . Alternatively, decoding a Gray code into a binary number can be described as a prefix sum of the bits in the Gray code, where each individual summation operation in the prefix sum is performed modulo two.





To construct the binary-reflected Gray code iteratively, at step 0 start with the , and at step find the bit position of the least significant 1 in the binary representation of and flip the bit at that position in the previous code to get the next code . The bit positions start 0, 1, 0, 2, 0, 1, 0, 3, … (sequence A007814 in the OEIS). See find first set for efficient algorithms to compute these values.




Converting to and from Gray code
The following functions in C convert between binary numbers and their associated Gray codes. While it may seem that Gray-to-binary conversion requires each bit to be handled one at a time, faster algorithms exist.[36]
typedef unsigned int uint;
// This function converts an unsigned binary number to reflected binary Gray code.
uint BinaryToGray(uint num)
{
return num ^ (num >> 1); // The operator >> is shift right. The operator ^ is exclusive or.
}
// This function converts a reflected binary Gray code number to a binary number.
uint GrayToBinary(uint num)
{
uint mask = num;
while (mask) { // Each Gray code bit is exclusive-ored with all more significant bits.
mask >>= 1;
num ^= mask;
}
return num;
}
// A more efficient version for Gray codes 32 bits or fewer through the use of SWAR (SIMD within a register) techniques.
// It implements a parallel prefix XOR function. The assignment statements can be in any order.
//
// This function can be adapted for longer Gray codes by adding steps.
uint GrayToBinary32(uint num)
{
num ^= num >> 16;
num ^= num >> 8;
num ^= num >> 4;
num ^= num >> 2;
num ^= num >> 1;
return num;
}
// A Four-bit-at-once variant changes a binary number (abcd)2 to (abcd)2 ^ (00ab)2, then to (abcd)2 ^ (00ab)2 ^ (0abc)2 ^ (000a)2.
Special types of Gray codes
In practice, "Gray code" almost always refers to a binary-reflected Gray code (BRGC). However, mathematicians have discovered other kinds of Gray codes. Like BRGCs, each consists of a lists of words, where each word differs from the next in only one digit (each word has a Hamming distance of 1 from the next word).
n-ary Gray code
|
There are many specialized types of Gray codes other than the binary-reflected Gray code. One such type of Gray code is the n-ary Gray code, also known as a non-Boolean Gray code. As the name implies, this type of Gray code uses non-Boolean values in its encodings.
For example, a 3-ary (ternary) Gray code would use the values {0, 1, 2}. The (n, k)-Gray code is the n-ary Gray code with k digits.[37] The sequence of elements in the (3, 2)-Gray code is: {00, 01, 02, 12, 11, 10, 20, 21, 22}. The (n, k)-Gray code may be constructed recursively, as the BRGC, or may be constructed iteratively. An algorithm to iteratively generate the (N, k)-Gray code is presented (in C):
// inputs: base, digits, value
// output: Gray
// Convert a value to a Gray code with the given base and digits.
// Iterating through a sequence of values would result in a sequence
// of Gray codes in which only one digit changes at a time.
void toGray(unsigned base, unsigned digits, unsigned value, unsigned gray[digits])
{
unsigned baseN[digits]; // Stores the ordinary base-N number, one digit per entry
unsigned i; // The loop variable
// Put the normal baseN number into the baseN array. For base 10, 109
// would be stored as [9,0,1]
for (i = 0; i < digits; i++) {
baseN[i] = value % base;
value = value / base;
}
// Convert the normal baseN number into the Gray code equivalent. Note that
// the loop starts at the most significant digit and goes down.
unsigned shift = 0;
while (i--) {
// The Gray digit gets shifted down by the sum of the higher
// digits.
gray[i] = (baseN[i] + shift) % base;
shift = shift + base - gray[i]; // Subtract from base so shift is positive
}
}
// EXAMPLES
// input: value = 1899, base = 10, digits = 4
// output: baseN[] = [9,9,8,1], gray[] = [0,1,7,1]
// input: value = 1900, base = 10, digits = 4
// output: baseN[] = [0,0,9,1], gray[] = [0,1,8,1]
There are other Gray code algorithms for (n,k)-Gray codes. The (n,k)-Gray code produced by the above algorithm is always cyclical; some algorithms, such as that by Guan,[37] lack this property when k is odd. On the other hand, while only one digit at a time changes with this method, it can change by wrapping (looping from n − 1 to 0). In Guan's algorithm, the count alternately rises and falls, so that the numeric difference between two Gray code digits is always one.
Gray codes are not uniquely defined, because a permutation of the columns of such a code is a Gray code too. The above procedure produces a code in which the lower the significance of a digit, the more often it changes, making it similar to normal counting methods.
See also Skew binary number system, a variant ternary number system where at most 2 digits change on each increment, as each increment can be done with at most one digit carry operation.
Balanced Gray code
Although the binary reflected Gray code is useful in many scenarios, it is not optimal in certain cases because of a lack of "uniformity".[30] In balanced Gray codes, the number of changes in different coordinate positions are as close as possible. To make this more precise, let G be an R-ary complete Gray cycle having transition sequence ; the transition counts (spectrum) of G are the collection of integers defined by


A Gray code is uniform or uniformly balanced if its transition counts are all equal, in which case we have for all k. Clearly, when , such codes exist only if n is a power of 2. Otherwise, if n does not divide evenly, it is possible to construct well-balanced codes where every transition count is either or .[30] Gray codes can also be exponentially balanced if all of their transition counts are adjacent powers of two, and such codes exist for every power of two.[38]





For example, a balanced 4-bit Gray code has 16 transitions, which can be evenly distributed among all four positions (four transitions per position), making it uniformly balanced:[30]
0 1 1 1 1 1 1 0 0 0 0 0 0 1 1 0 0 0 1 1 1 1 0 0 1 1 1 1 0 0 0 0 0 0 0 0 1 1 1 1 1 0 0 1 1 1 0 0 0 0 0 1 1 0 0 0 0 0 1 1 1 1 1 1
whereas a balanced 5-bit Gray code has a total of 32 transitions, which cannot be evenly distributed among the positions. In this example, four positions have six transitions each, and one has eight:[30]
1 1 1 1 1 0 0 0 0 1 1 1 1 1 1 0 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 1 1 0 0 0 1 1 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 1 1 1 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1 1 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 1 1 0 0 0 1 1 1 1 1 1
We will now show a construction[39] and implementation[40] for well-balanced binary Gray codes which allows us to generate an n-digit balanced Gray code for every n. The main principle is to inductively construct an (n + 2)-digit Gray code given an n-digit Gray code G in such a way that the balanced property is preserved. To do this, we consider partitions of into an even number L of non-empty blocks of the form



where , and ). This partition induces an -digit Gray code given by







If we define the transition multiplicities to be the number of times the digit in position i changes between consecutive blocks in a partition, then for the (n + 2)-digit Gray code induced by this partition the transition spectrum is



The delicate part of this construction is to find an adequate partitioning of a balanced n-digit Gray code such that the code induced by it remains balanced, but for this only the transition multiplicities matter; joining two consecutive blocks over a digit transition and splitting another block at another digit transition produces a different Gray code with exactly the same transition spectrum , so one may for example[38] designate the first transitions at digit as those that fall between two blocks. Uniform codes can be found when and , and this construction can be extended to the R-ary case as well.[39]



Monotonic Gray codes
Monotonic codes are useful in the theory of interconnection networks, especially for minimizing dilation for linear arrays of processors.[41] If we define the weight of a binary string to be the number of 1s in the string, then although we clearly cannot have a Gray code with strictly increasing weight, we may want to approximate this by having the code run through two adjacent weights before reaching the next one.
We can formalize the concept of monotone Gray codes as follows: consider the partition of the hypercube into levels of vertices that have equal weight, i.e.


for . These levels satisfy . Let be the subgraph of induced by , and let be the edges in . A monotonic Gray code is then a Hamiltonian path in such that whenever comes before in the path, then .









An elegant construction of monotonic n-digit Gray codes for any n is based on the idea of recursively building subpaths of length having edges in .[41] We define , whenever or , and








otherwise. Here, is a suitably defined permutation and refers to the path P with its coordinates permuted by . These paths give rise to two monotonic n-digit Gray codes and given by






The choice of which ensures that these codes are indeed Gray codes turns out to be . The first few values of are shown in the table below.

| j = 0 | j = 1 | j = 2 | j = 3 | |
|---|---|---|---|---|
| n = 1 | 0, 1 | |||
| n = 2 | 00, 01 | 10, 11 | ||
| n = 3 | 000, 001 | 100, 110, 010, 011 | 101, 111 | |
| n = 4 | 0000, 0001 | 1000, 1100, 0100, 0110, 0010, 0011 | 1010, 1011, 1001, 1101, 0101, 0111 | 1110, 1111 |
These monotonic Gray codes can be efficiently implemented in such a way that each subsequent element can be generated in O(n) time. The algorithm is most easily described using coroutines.
Monotonic codes have an interesting connection to the Lovász conjecture, which states that every connected vertex-transitive graph contains a Hamiltonian path. The "middle-level" subgraph is vertex-transitive (that is, its automorphism group is transitive, so that each vertex has the same "local environment"" and cannot be differentiated from the others, since we can relabel the coordinates as well as the binary digits to obtain an automorphism) and the problem of finding a Hamiltonian path in this subgraph is called the "middle-levels problem", which can provide insights into the more general conjecture. The question has been answered affirmatively for , and the preceding construction for monotonic codes ensures a Hamiltonian path of length at least 0.839N where N is the number of vertices in the middle-level subgraph.[42]


Beckett–Gray code
Another type of Gray code, the Beckett–Gray code, is named for Irish playwright Samuel Beckett, who was interested in symmetry. His play "Quad" features four actors and is divided into sixteen time periods. Each period ends with one of the four actors entering or leaving the stage. The play begins with an empty stage, and Beckett wanted each subset of actors to appear on stage exactly once.[43] Clearly the set of actors currently on stage can be represented by a 4-bit binary Gray code. Beckett, however, placed an additional restriction on the script: he wished the actors to enter and exit so that the actor who had been on stage the longest would always be the one to exit. The actors could then be represented by a first in, first out queue, so that (of the actors onstage) the actor being dequeued is always the one who was enqueued first.[43] Beckett was unable to find a Beckett–Gray code for his play, and indeed, an exhaustive listing of all possible sequences reveals that no such code exists for n = 4. It is known today that such codes do exist for n = 2, 5, 6, 7, and 8, and do not exist for n = 3 or 4. An example of an 8-bit Beckett–Gray code can be found in Donald Knuth's Art of Computer Programming.[19] According to Sawada and Wong, the search space for n = 6 can be explored in 15 hours, and more than 9,500 solutions for the case n = 7 have been found.[44]
Snake-in-the-box codes
Snake-in-the-box codes, or snakes, are the sequences of nodes of induced paths in an n-dimensional hypercube graph, and coil-in-the-box codes, or coils, are the sequences of nodes of induced cycles in a hypercube. Viewed as Gray codes, these sequences have the property of being able to detect any single-bit coding error. Codes of this type were first described by William H. Kautz in the late 1950s;[13] since then, there has been much research on finding the code with the largest possible number of codewords for a given hypercube dimension.
Single-track Gray code
Yet another kind of Gray code is the single-track Gray code (STGC) developed by Norman B. Spedding[45][46] and refined by Hiltgen, Paterson and Brandestini in "Single-track Gray codes" (1996).[47][48] The STGC is a cyclical list of P unique binary encodings of length n such that two consecutive words differ in exactly one position, and when the list is examined as a P × n matrix, each column is a cyclic shift of the first column.[49]

The name comes from their use with rotary encoders, where a number of tracks are being sensed by contacts, resulting for each in an output of 0 or 1. To reduce noise due to different contacts not switching at exactly the same moment in time, one preferably sets up the tracks so that the data output by the contacts are in Gray code. To get high angular accuracy, one needs lots of contacts; in order to achieve at least 1 degree accuracy, one needs at least 360 distinct positions per revolution, which requires a minimum of 9 bits of data, and thus the same number of contacts.
If all contacts are placed at the same angular position, then 9 tracks are needed to get a standard BRGC with at least 1 degree accuracy. However, if the manufacturer moves a contact to a different angular position (but at the same distance from the center shaft), then the corresponding "ring pattern" needs to be rotated the same angle to give the same output. If the most significant bit (the inner ring in Figure 1) is rotated enough, it exactly matches the next ring out. Since both rings are then identical, the inner ring can be cut out, and the sensor for that ring moved to the remaining, identical ring (but offset at that angle from the other sensor on that ring). Those two sensors on a single ring make a quadrature encoder. That reduces the number of tracks for a "1 degree resolution" angular encoder to 8 tracks. Reducing the number of tracks still further can't be done with BRGC.
For many years, Torsten Sillke[50] and other mathematicians believed that it was impossible to encode position on a single track such that consecutive positions differed at only a single sensor, except for the 2-sensor, 1-track quadrature encoder. So for applications where 8 tracks were too bulky, people used single-track incremental encoders (quadrature encoders) or 2-track "quadrature encoder + reference notch" encoders.
Norman B. Spedding, however, registered a patent in 1994 with several examples showing that it was possible.[45] Although it is not possible to distinguish 2n positions with n sensors on a single track, it is possible to distinguish close to that many. Etzion and Paterson conjecture that when n is itself a power of 2, n sensors can distinguish at most 2n − 2n positions and that for prime n the limit is 2n − 2 positions.[51] The authors went on to generate a 504 position single track code of length 9 which they believe is optimal. Since this number is larger than 28 = 256, more than 8 sensors are required by any code, although a BRGC could distinguish 512 positions with 9 sensors.
An STGC for P = 30 and n = 5 is reproduced here:
| Angle | Code | Angle | Code | Angle | Code | Angle | Code | Angle | Code | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0° | 10000 | 72° | 01000 | 144° | 00100 | 216° | 00010 | 288° | 00001 | ||||
| 12° | 10100 | 84° | 01010 | 156° | 00101 | 228° | 10010 | 300° | 01001 | ||||
| 24° | 11100 | 96° | 01110 | 168° | 00111 | 240° | 10011 | 312° | 11001 | ||||
| 36° | 11110 | 108° | 01111 | 180° | 10111 | 252° | 11011 | 324° | 11101 | ||||
| 48° | 11010 | 120° | 01101 | 192° | 10110 | 264° | 01011 | 336° | 10101 | ||||
| 60° | 11000 | 132° | 01100 | 204° | 00110 | 276° | 00011 | 348° | 10001 |
Each column is a cyclic shift of the first column, and from any row to the next row only one bit changes.[52] The single-track nature (like a code chain) is useful in the fabrication of these wheels (compared to BRGC), as only one track is needed, thus reducing their cost and size. The Gray code nature is useful (compared to chain codes, also called De Bruijn sequences), as only one sensor will change at any one time, so the uncertainty during a transition between two discrete states will only be plus or minus one unit of angular measurement the device is capable of resolving.[53]
Two-dimensional Gray code
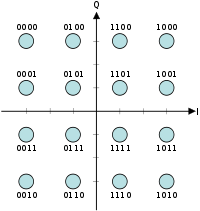
Two-dimensional Gray codes are used in communication to minimize the number of bit errors in quadrature amplitude modulation adjacent points in the constellation. In a typical encoding the horizontal and vertical adjacent constellation points differ by a single bit, and diagonal adjacent points differ by 2 bits.[54]
Gray isometry
The bijective mapping { 0 ↔ 00, 1 ↔ 01, 2 ↔ 11, 3 ↔ 10 } establishes an isometry between the metric space over the finite field with the metric given by the Hamming distance and the metric space over the finite ring (the usual modular arithmetic) with the metric given by the Lee distance. The mapping is suitably extended to an isometry of the Hamming spaces and . Its importance lies in establishing a correspondence between various "good" but not necessarily linear codes as Gray-map images in of ring-linear codes from .[55][56]




Related codes
There are a number of binary codes similar to Gray codes, including:
- Datex codes aka Giannini codes (1954) as described by Carl P. Spaulding[16][57][58][59] use a variant of O'Brien code II.
- Codes used by Varec (ca. 1954),[60][61][62][63] use a variant of O'Brien code I as well as base-12 and base-16 Gray code variants.
- Lucal code (1959)[1][2] aka modified reflected binary code (MRB)[1][2]
- Gillham code (1961/1962),[57][64][65][66] uses a variant of Datex code and O'Brien code II.
- Leslie and Russell code (1964)[67][17][68][64]
- Royal Radar Establishment code[64]
- Hoklas code (1988)[69][70][71]
The following binary-coded decimal (BCD) codes are Gray code variants as well:
- Petherick code (1953),[7][72][73][74][70][nb 1] also known as Royal Aircraft Establishment (RAE) code.[75]
- O'Brien codes I and II (1955)[76][77][78][58][59][70] (An O'Brien type-I code[nb 2] was already described by Frederic A. Foss of IBM[79][80] and used by Varec in 1954. Later, it was also known as Watts code or Watts reflected decimal (WRD) code.[81][9][10][82][83][84][85][86] An O'Brien type-II code was already used by Datex in 1954.[nb 1])
- Excess-3 Gray code (1956)[87] (aka Gray excess-3 code,[58][59] Gray 3-excess code, reflex excess-3 code, excess Gray code,[70] Gray excess code, 10-excess-3 Gray code or Gray–Stibitz code), described by Frank P. Turvey, Jr. of ITT.[87]
- Tompkins codes I and II (1956)[12][77][78][58][59][70]
- Glixon code (1957)[88][89][90][77][78][58][59][70][nb 2]
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| References for code charts by Gray,[77][78] Paul,[91] Glixon,[88][77][78][89][90][nb 2] Tompkins I,[12][77][78] O'Brien I,[76][77][78][nb 2] Petherick,[7][74][nb 1] O'Brien II,[76][77][78][nb 1] Susskind,[14] Klar,[92][93] Tompkins II[12][77][78] and for excess-3 Gray[70]. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
See also
- Linear feedback shift register
- De Bruijn sequence
- Steinhaus–Johnson–Trotter algorithm, an algorithm that generates Gray codes for the factorial number system
- Minimum distance code
Notes
- By interchanging and inverting three bit columns, the O'Brien code II and the Petherick code can be transferred into each other.
- By swapping two pairs of bit columns, individually shifting four bit columns and inverting one of them, the Glixon code and the O'Brien code I can be transferred into each other.
References
- Lucal, Harold M. (December 1959). "Arithmetic Operations for Digital Computers Using a Modified Reflected Binary". IRE Transactions on Electronic Computers. EC-8 (4): 449–458. doi:10.1109/TEC.1959.5222057. ISSN 0367-9950. S2CID 206673385. (10 pages)
- Sellers, Jr., Frederick F.; Hsiao, Mu-Yue; Bearnson, Leroy W. (November 1968). Error Detecting Logic for Digital Computers (1st ed.). New York, USA: McGraw-Hill Book Company. pp. 152–164. LCCN 68-16491. OCLC 439460.
- , "Pulse code communication" (NB. U.S. Patent 2,632,058 filed November 1947.)
- , "Encoding Circuit" (NB. U.S. Patent 2,733,432 filed December 1953.)
- , "Direction-Sensitive Binary Code Position Control System" (NB. U.S. Patent 2,823,345 filed October 1953.)
- , "Automatic Rectification System" (NB. U.S. Patent 2,839,974 filed January 1954.)
- Petherick, Edward John (October 1953). A Cyclic Progressive Binary-coded-decimal System of Representing Numbers (Technical Note MS15). Farnborough, UK: Royal Aircraft Establishment (RAE). (4 pages) (NB. Sometimes referred to as A Cyclic-Coded Binary-Coded-Decimal System of Representing Numbers.)
- Winder, C. Farrell (October 1959). "Shaft Angle Encoders Afford High Accuracy" (PDF). Electronic Industries. Chilton Company. 18 (10): 76–80. Retrieved 2018-01-14.
[…] The type of code wheel most popular in optical encoders contains a cyclic binary code pattern designed to give a cyclic sequence of "on-off" outputs. The cyclic binary code is also known as the cyclic progression code, the reflected binary code, and the Gray code. This code was originated by G. R. Stibitz, of Bell Telephone Laboratories, and was first proposed for pulse code modulation systems by Frank Gray, also of BTL. Thus the name Gray code. It is also named as "Unit Distance Code" as any two adjacent codes is differ by one (1). The Gray or cyclic code is used mainly to eliminate the possibility of errors at code transition which could result in gross ambiguities. […]
- Evans, David Silvester (1960). Fundamentals of Digital Instrumentation (1 ed.). London, UK: Hilger & Watts Ltd. Retrieved 2020-05-24. (39 pages)
- Evans, David Silvester (1961). Digital Data: Their Derivation and Reduction for Analysis and Process Control (1 ed.). London, UK: Hilger & Watts Ltd / Interscience Publishers. Retrieved 2020-05-24. (82 pages)
- Newson, P. A. (1965). Tables for the Binary Encoding of Angles (1 ed.). United Kingdom Atomic Energy Authority, Research Group, Atomic Energy Research Establishment, Harwell, UK: H. M. Stationery Office. Retrieved 2020-05-24. (12 pages)
- Tompkins, Howard E. (September 1956) [1956-07-16]. "Unit-Distance Binary-Decimal Codes for Two-Track Commutation". IRE Transactions on Electronic Computers. Correspondence. Moore School of Electrical Engineering, University of Pennsylvania, Philadelphia, Pennsylvania, USA. EC-5 (3): 139. doi:10.1109/TEC.1956.5219934. ISSN 0367-9950. Retrieved 2020-05-18. (1 page)
- Kautz, William H. (June 1958). "Unit-Distance Error-Checking Codes". IRE Transactions on Electronic Computers. EC-7 (2): 179–180. doi:10.1109/TEC.1958.5222529. ISSN 0367-9950. S2CID 26649532.
- Susskind, Alfred K.; Ward, John E. (1958-03-28) [1957, 1956]. "III.F. Unit-Distance Codes / VI.E.2. Reflected Binary Codes". Written at Cambridge, Massachusetts, USA. In Susskind, Alfred K. (ed.). notes on Analog-Digital Conversion Techniques. Technology Books in Science and Engineering. 1 (3 ed.). New York, USA: Technology Press of the Massachusetts Institute of Technology / John Wiley & Sons, Inc. / Chapman & Hall, Ltd. pp. 3-10–3-16 [3-13–3-16], 6-65–6-60 [6-60]. (x+416+2 pages) (NB. The contents of the book was originally prepared by staff members of the Servomechanisms Laboraratory, Department of Electrical Engineering, MIT, for Special Summer Programs held in 1956 and 1957. Susskind's "reading-type code" is actually a minor variant of the code shown here with the two most significant bit columns swapped to better illustrate symmetries. Also, by swapping two bit columns and inverting one of them, the code can be transferred into the Petherick code, whereas by swapping and inverting two bit columns, the code can be transferred into the O'Brien code II.)
- Chinal, Jean P. (January 1973). "3.3. Unit Distance Codes". Written at Paris, France. Design Methods for Digital Systems. Translated by Preston, Alan; Summer, Arthur (1st English ed.). Berlin, Germany: Akademie-Verlag / Springer-Verlag. p. 50. doi:10.1007/978-3-642-86187. ISBN 978-0-387-05871-9. License No. 202-100/542/73. Order No. 7617470(6047) ES 19 B 1 / 20 K 3. Retrieved 2020-06-21. (xviii+506 pages) (NB. The French 1967 original book was named "Techniques Booléennes et Calculateurs Arithmétiques", published by Éditions Dunod.)
- Spaulding, Carl P. (1965-01-12) [1954-03-09]. "Digital coding and translating system". Datex Corp. Patent US3165731A. Archived from the original on 2018-01-21. Retrieved 2018-01-21.
- Russell, A. (August 1964). "Some Binary Codes and a Novel Five-Channel Code". Control (Systems, Instrumentation, Data Processing, Automation, Management, incorporating Automation Progress). Special Features. London, UK: Morgan-Grampain (Publishers) Limited. 8 (74): 399–404. Retrieved 2020-06-22. (6 pages)
- Pickover, Clifford A. (2009). The Math Book: From Pythagoras to the 57th Dimension, 250 Milestones in the History of Mathematics. Sterling Publishing Company. p. 392. ISBN 978-1-40275796-9.
- Knuth, Donald Ervin (2004-10-15). "Generating all n-tuples". The Art of Computer Programming, Volume 4A: Enumeration and Backtracking. pre-fascicle 2a.
- Heath, F. G. (September 1961). "Pioneers Of Binary Coding". Journal of the Institution of Electrical Engineers. Manchester College of Science and Technology, Faculty of Technology of the University of Manchester, Manchester, UK: Institution of Engineering and Technology (IET). 7 (81): 539–541. doi:10.1049/jiee-3.1961.0300. Retrieved 2020-06-22. (3 pages)
- Cattermole, Kenneth W. (1969). Written at Harlow, Essex, UK. Principles of pulse code modulation (1 ed.). London, UK / New York, USA: Iliffe Books Ltd. / American Elsevier Publishing Company, Inc. p. 245, 434. ISBN 978-0-444-19747-4. LCCN 78-80432. SBN 444-19747-8.
[…] There seems to be some confusion about the attributation of this code, because two inventors named Gray have been associated with it. When I first heard the name I took it as referring to Elisha Gray, and Heath testifies to his usage of it. Many people take it as referring to Frank Gray of Bell Telephone Laboratories, who in 1947 first proposed its use in coding tubes: his patent is listed in the bibliography. […]
(2+448+2 pages) - Edwards, Anthony William Fairbank (2004). Cogwheels of the Mind: The Story of Venn Diagrams. Baltimore, Maryland, USA: Johns Hopkins University Press. pp. 48, 50. ISBN 0-8018-7434-3. ISBN 978-0-8018-7434-5.
- Goodall, William M. (January 1951). "Television by Pulse Code Modulation". Bell System Technical Journal. 30 (1): 33–49. doi:10.1002/j.1538-7305.1951.tb01365.x. (NB. Presented orally before the I.R.E. National Convention, New York City, March 1949.)
- Wakerly, John F. (1994). Digital Design: Principles & Practices. New Jersey, USA: Prentice Hall. pp. 48–49, 222. ISBN 0-13-211459-3. ISBN 978-0-13-211459-2. (NB. The two page sections taken together say that K-maps are labeled with Gray code. The first section says that they are labeled with a code that changes only one bit between entries and the second section says that such a code is called Gray code.)
- Brown, Frank Markham (2012) [2003, 1990]. Boolean Reasoning - The Logic of Boolean Equations (reissue of 2nd ed.). Mineola, New York: Dover Publications, Inc. p. 49. ISBN 978-0-486-42785-0. 1st edition
- Händler, Wolfgang (1958). Ein Minimisierungsverfahren zur Synthese von Schaltkreisen (Minimisierungsgraphen) (Dissertation) (in German). Potsdam, Germany: Technische Hochschule Darmstadt. D 17. (73 pages+app.)
- Berger, Erich R.; Händler, Wolfgang (1967) [1962]. Steinbuch, Karl W.; Wagner, Siegfried W. (eds.). Taschenbuch der Nachrichtenverarbeitung (in German) (2 ed.). Berlin, Germany: Springer-Verlag OHG. pp. 64, 1034–1035, 1036, 1038. LCCN 67-21079. Title No. 1036.
[…] Übersichtlich ist die Darstellung nach Händler, die sämtliche Punkte, numeriert nach dem Gray-Code […], auf dem Umfeld eines Kreises anordnet. Sie erfordert allerdings sehr viel Platz. […] [Händler's diagram, where all points, numbered according to the Gray code, are arranged on the circumference of a circle, is easily comprehensible. It needs, however, a lot of space.]
- "Informatik Sammlung Erlangen (ISER)" (in German). Erlangen, Germany: Friedrich-Alexander Universität. 2012-03-13. Archived from the original on 2017-05-16. Retrieved 2017-04-12.
- "Informatik Sammlung Erlangen (ISER) - Impressum" (in German). Erlangen, Germany: Friedrich-Alexander Universität. 2012-03-13. Archived from the original on 2012-02-26. Retrieved 2017-04-15.
- Bhat, Girish S.; Savage, Carla Diane (1996). "Balanced Gray Codes". Electronic Journal of Combinatorics. 3 (1). doi:10.37236/1249.
- Donohue, Ryan (2003). "Synchronization in Digital Logic Circuits" (PDF). Archived (PDF) from the original on 2018-01-15. Retrieved 2018-01-15.
- Mehta, Huzefa; Owens, Robert Michael; Irwin, Mary Jane "Janie" (1996-03-22). Some issues in Gray code addressing. Proceedings of the 6th Great Lakes Symposium on VLSI (GLSVLSI 96). IEEE Computer Society. pp. 178–181. doi:10.1109/GLSV.1996.497616. ISBN 978-0-8186-7502-7. ISSN 1066-1395.
- Doran, Robert "Bob" William (March 2007). The Gray Code (PDF). CDMTCS Research Report Series. Centre for Discrete Mathematics and Theoretical Computer Science, University of Auckland, New Zealand. CDMTCS-304. Archived (PDF) from the original on 2020-05-22. Retrieved 2020-05-23. (25 pages)
- Su, Ching-Long; Tsui, Chi-Ying; Despain, Alvin M. (1994). Low Power Architecture Design and Compilation Techniques for High-Performance Processors (PDF) (Report). Advanced Computer Architecture Laboratory. ACAL-TR-94-01.
- Guo, Hui; Parameswaran, Sri (April–June 2010). "Shifted Gray encoding to reduce instruction memory address bus switching for low-power embedded systems". Journal of Systems Architecture. 56 (4–6): 180–190. doi:10.1016/j.sysarc.2010.03.003.
- Dietz, Henry Gordon. "The Aggregate Magic Algorithms: Gray Code Conversion".
- Guan, Dah-Jyh (1998). "Generalized Gray Codes with Applications". Proceedings of the National Scientific Council, Republic of China, Part A. 22: 841–848. CiteSeerX 10.1.1.119.1344.
- Suparta, I. Nengah (2005). "A simple proof for the existence of exponentially balanced Gray codes". Electronic Journal of Combinatorics. 12. doi:10.37236/1986.
- Flahive, Mary Elizabeth; Bose, Bella (2007). "Balancing cyclic R-ary Gray codes". Electronic Journal of Combinatorics. 14. doi:10.37236/949.
- Strackx, Raoul; Piessens, Frank (2016). "Ariadne: A Minimal Approach to State Continuity". Usenix Security. 25.
- Savage, Carla Diane; Winkler, Peter (1995). "Monotone Gray codes and the middle levels problem". Journal of Combinatorial Theory, Series A. 70 (2): 230–248. doi:10.1016/0097-3165(95)90091-8. ISSN 0097-3165.
- Savage, Carla Diane (1997-01-16). "Long cycles in the middle two levels of the Boolean lattice". Ars Combinatoria. North Carolina State University, Raleigh, North Carolina, USA. 35 (A): 97–108. CiteSeerX 10.1.1.39.2249. ISSN 0381-7032. S2CID 15975960. Archived from the original on 2020-05-13. Retrieved 2020-05-13. (15 pages)
- Goddyn, Luis (1999). "MATH 343 Applied Discrete Math Supplementary Materials" (PDF). Department of Mathematics, Simon Fraser University. Archived from the original (PDF) on 2015-02-17.
- Sawada, Joseph "Joe"; Wong, Dennis Chi-Him (2007). "A Fast Algorithm to generate Beckett–Gray codes". Electronic Notes in Discrete Mathematics. 29: 571–577. doi:10.1016/j.endm.2007.07.091.
- NZ 264738, Spedding, Norman Bruce, "A position encoder", published 1994-10-28
- Spedding, Norman Bruce (1994-10-28). "The following is a copy of the provisional patent filed on behalf of Industrial Research Limited on 28 October 1994 - NZ Patent 264738" (PDF). Industrial Research Limited. NZ Patent 264738. Archived (PDF) from the original on 2017-10-29. Retrieved 2018-01-14.
- Hiltgen, Alain P.; Paterson, Kenneth G.; Brandestini, Marco (September 1996). "Single-Track Gray Codes" (PDF). IEEE Transactions on Information Theory. 42 (5): 1555–1561. doi:10.1109/18.532900. Zbl 857.94007.
- Hiltgen, Alain P.; Paterson, Kenneth G. (September 2001). "Single-Track Circuit Codes" (PDF). IEEE Transactions on Information Theory. 47 (6): 2587–2595. CiteSeerX 10.1.1.10.8218. doi:10.1109/18.945274. Archived (PDF) from the original on 2018-01-15. Retrieved 2018-01-15.
- Etzion, Tuvi; Schwartz, Moshe (November 1999) [1998-05-17]. "The Structure of Single-Track Gray Codes" (PDF). IEEE Transactions on Information Theory. IT-45 (7): 2383–2396. CiteSeerX 10.1.1.14.8333. doi:10.1109/18.796379. Archived (PDF) from the original on 2018-01-15. Retrieved 2018-01-15. Technical Report CS0937
- Sillke, Torsten (1997) [1993-03-01]. "Gray-Codes with few tracks (a question of Marco Brandestini)". Archived from the original on 2017-10-29. Retrieved 2017-10-29.
- Etzion, Tuvi; Paterson, Kenneth G. (May 1996). "Near Optimal Single-Track Gray Codes" (PDF). IEEE Transactions on Information Theory. IT-42 (3): 779–789. CiteSeerX 10.1.1.14.1527. doi:10.1109/18.490544. Archived (PDF) from the original on 2016-10-30. Retrieved 2018-04-08.
- Ruskey, Frank; Weston, Mark (2005-06-18). "A Survey of Venn Diagrams: Symmetric Diagrams". Dynamic Surveys. Electronic Journal of Combinatorics. doi:10.37236/26.
- Alciatore, David G.; Histand, Michael B. (1999). Mechatronics. McGraw–Hill Education – Europe. ISBN 978-0-07-131444-2.
- Krishna (2008-05-11). "Gray code for QAM". Archived from the original on 2017-10-29. Retrieved 2017-10-29.
- Greferath, Marcus (2009). "An Introduction to Ring-Linear Coding Theory". In Sala, Massimiliano; Mora, Teo; Perret, Ludovic; Sakata, Shojiro; Traverso, Carlo (eds.). Gröbner Bases, Coding, and Cryptography. Springer Science & Business Media. p. 220. ISBN 978-3-540-93806-4.
- Solé, Patrick (2016-04-17). Hazewinkel, Michiel (ed.). Kerdock and Preparata codes. Encyclopedia of Mathematics. Springer Science+Business Media. ISBN 1-4020-0609-8. ISBN 978-1-4020-0609-8. Archived from the original on 2017-10-29. Retrieved 2017-10-29.
- Wheeler, Edwin L. (1969-12-30) [1968-04-05]. "Analog to digital encoder". Conrac Corp. Patent US3487460A. Archived from the original on 2018-01-21. Retrieved 2018-01-21.
[…] The MOA-GILLHAM code is essentially the combination of the Gray code discussed thereinabove and the well known Datex code; the Datex code is disclosed in U.S. Patent 3,165,731. The arrangement is such that the Datex code defines the bits for the units count of the encoder and the Gray code defines the bits for each of the higher order decades, the tens, hundreds, etc […]
- Dokter, Folkert; Steinhauer, Jürgen (1973-06-18). "2.4. Coding numbers in the binary system". Digital Electronics. Philips Technical Library (PTL) / Macmillan Education (Reprint of 1st English ed.). Eindhoven, Netherlands: The Macmillan Press Ltd. / N. V. Philips' Gloeilampenfabrieken. pp. 32, 39, 50–53. doi:10.1007/978-1-349-01417-0. ISBN 978-1-349-01419-4. SBN 333-13360-9. Retrieved 2020-05-11.
[…] The Datex code […] uses the O'Brien code II within each decade, and reflected decimal numbers for the decimal transitions. For further processing, code conversion to the natual decimal notation is necessary. Since the O'Brien II code forms a 9s complement, this does not give rise to particular difficulties: whenever the code word for the tens represents an odd number, the code words for the decimal units are given as the 9s complements by inversion of the fourth binary digit. […]
(270 pages) - Dokter, Folkert; Steinhauer, Jürgen (1975) [1969]. "2.4.4.6. Einschrittige Kodes". Digitale Elektronik in der Meßtechnik und Datenverarbeitung: Theoretische Grundlagen und Schaltungstechnik. Philips Fachbücher (in German). I (improved and extended 5th ed.). Hamburg, Germany: Deutsche Philips GmbH. pp. 41, 48, 51, 58, 60–61. ISBN 3-87145-272-6. (xii+327+3 pages)
- "…accurate liquid level metering - at ANY DISTANCE!". Petroleum Refiner (Advertisement). Gulf Publishing Company. 33 (9): 368. September 1954. ISSN 0096-6517.
[…] The complete dispatching operation, gauging, and remote control is integrated into one single unitized system when a "Varec" Pulse Code Telemetering System is installed. […]
- Bishup, Bernard W.; Repeta, Anthony A.; Giarrizzo, Frank C. (1968-08-13) [1963-04-03]. "Telemetering and supervisory control system having normally continuous telemetering signals". Leeds and Northrup Co. US3397386A.
- "Encoder Pulse Format". Installation and Operations Manual for the Model 1900 Micro 4-Wire Transmitter (PDF). Cypress, California, USA: Whessoe Varec, Inc. January 1993 [1991-07-01]. pp. 04-4–04-8. 33-08461. Archived (PDF) from the original on 2020-04-16. Retrieved 2020-05-16. (38 pages) (NB. Position 5 for "Inches" on page 04-8 should read "0111" rather than "1111".)
- "2.2.3.3 MSP Level Data Format". Varec Model 1900 - Micro 4-Wire Transmitter (BSAP to Mark / Space Protocol (MSP)) - Application Notes (PDF). Emerson Electric. pp. 11–14. Archived (PDF) from the original on 2020-05-16. Retrieved 2020-05-16. (vi+33 pages)
- Wightman, Eric Jeffrey (1972). "Chapter 6. Displacement measurement". Instrumentation in Process Control (1 ed.). London, UK: Butterworth & Co (Publishers) Ltd. pp. 122–123. ISBN 0-408-70293-1. ISBN 1-48316335-0, 978-1-48316335-2.
[…] Other forms of code are also well known. Among these are the Royal Radar Establishment code; The Excess Three decimal code; Gillham code which is recommended by ICAO for automatic height transmission for air traffic control purposes; the Petherick code, and the Leslie and Russell code of the National Engineering Laboratory. Each has its particular merits and they are offered as options by various encoder manufacturers. […]
(12+367+5 pages) - Phillips, Darryl (2012-07-26) [1998]. "Altitude - MODEC ASCII". AirSport Avionics. Archived from the original on 2012-07-26.
- Stewart, K. (2010-12-03). "Aviation Gray Code: Gillham Code Explained". Custom Computer Services (CCS). Archived from the original on 2018-01-16. Retrieved 2018-01-14.
- Leslie, William "Bill" H. P.; Russell, A. (1964). A cyclic progressive decimal code for simple translation to decimal and analogue outputs (Report). East Kilbride, Glasgow, UK: National Engineering Laboratory. NEL Report 129. (17 pages)
- Leslie, William "Bill" H. P. (1974). "The work on NC at NEL". In Koenigsberger, Franz; Tobias, Stephen Albert (eds.). Proceedings of the Fourteenth International Machine Tool Design and Research Conference, 12–14 September 1973. The Macmillan Press Ltd. pp. 215–224 [215, 217]. ISBN 978-1-34901921-2. LCCN 73-16545. SBN 333-14913-0. ISBN 1-34901921-6.
- Hoklas, Archibald (1989-09-06) [1988-04-29]. "Abtastvorrichtung zur digitalen Weg- oder Winkelmessung" (PDF) (in German). VEB Schiffselektronik Johannes Warnke. GDR Patent DD271603A1. WP H 03 M / 315 194 8. Archived from the original (PDF) on 2018-01-18. Retrieved 2018-01-18 – via DEPATIS.
- Hoklas, Archibald (2005). "Gray code - Unit distance code". Archived from the original on 2018-01-15. Retrieved 2018-01-15.
- Hoklas, Archibald (2005). "Gray-Kode - Einschrittiger Abtastkode" (in German). Archived from the original on 2018-01-15. Retrieved 2018-01-15.
- Petherick, Edward John; Hopkins, A. J. (1958), Some Recently Developed Digital Devices for Encoding the Rotations of Shafts (Technical Note MS21), Farnborough, UK: Royal Aircraft Establishment (RAE)
- Digitizer als Analog-Digital-Wandler in der Steuer-, Meß- und Regeltechnik (PDF). technische mitteilungen - Relais, elektronische Geräte, Steuerungen (in German). Cologne-Niehl, Germany: Franz Baumgartner (FraBa). May 1963. Issue 13. Archived (PDF) from the original on 2020-05-21. Retrieved 2020-05-21.
[…] Die Firma Harrison Reproduction Equipment, Farnborough/England […] hat in jahrelanger Entwicklung in Zusammenarbeit mit der Britischen Luftwaffe und britischen Industriebetrieben den mechanischen Digitizer […] zu einer technischen Reife gebracht, die fast allen Anforderungen […] genügt. […] Um bei der dezimalen Entschlüsselung des verwendeten Binärcodes zu eindeutigen und bei der Übergabe von einer Dezimalstelle zur anderen in der Reihenfolge immer richtigen Ergebnissen zu kommen, wurde ein spezieller Code entwickelt, der jede Möglichkeit einer Fehlaussage durch sein Prinzip ausschließt und der außerdem durch seinen Aufbau eine relativ einfache Entschlüsselung erlaubt. Der Code basiert auf dem Petherick-Code. […]
(4 pages) - Charnley, C. J.; Bidgood, R. E.; Boardman, G. E. T. (October 1965). "The Design of a Pneumatic Position Encoder" (PDF). IFAC Proceedings Volumes. The College of Aeronautics, Cranfield, Bedford, England. 2 (3): 75–88. doi:10.1016/S1474-6670(17)68955-9. Chapter 1.5. Retrieved 2018-01-14.
- Hollingdale, Stuart H. (1958-09-19). "Session 14. Data Processing". Applications of Computers. Atlas - Application of Computers, University of Nottingham 15–19 September 1958 (Conference paper). Archived from the original on 2020-04-25. Retrieved 2020-05-25.
- O'Brien, Joseph A. (May 1956) [1955-11-15, 1955-06-23]. "Cyclic Decimal Codes for Analogue to Digital Converters". Transactions of the American Institute of Electrical Engineers, Part I: Communication and Electronics. Bell Telephone Laboratories, Whippany, New Jersey, USA. 75 (2): 120–122. doi:10.1109/TCE.1956.6372498. ISSN 0097-2452. Paper 56-21. Retrieved 2020-05-18. (3 pages) (NB. This paper was prepared for presentation at the AIEE Winter General Meeting, New York, USA, 1956-01-30 to 1956-02-03.)
- Steinbuch, Karl W., ed. (1962). Written at Karlsruhe, Germany. Taschenbuch der Nachrichtenverarbeitung (in German) (1 ed.). Berlin / Göttingen / New York: Springer-Verlag OHG. pp. 71–74, 97, 761–764, 770, 1080–1081. LCCN 62-14511.
- Steinbuch, Karl W.; Weber, Wolfgang; Heinemann, Traute, eds. (1974) [1967]. Taschenbuch der Informatik – Band II – Struktur und Programmierung von EDV-Systemen. Taschenbuch der Nachrichtenverarbeitung (in German). 2 (3 ed.). Berlin, Germany: Springer Verlag. pp. 98–100. ISBN 3-540-06241-6. LCCN 73-80607. ISBN 978-3-540-06241-7.
- Foss, Frederic A. (1960-12-27) [1954-12-17]. "Control Systems". International Business Machines Corp. Fig. 7, Fig. 8, Fig. 11. US475945A. (14 pages) (NB. The author called his code 2*-4-2-1 (+9-±7-±3-±1) reflected decimal code.)
- Foss, Frederic A. (December 1954). "The Use of a Reflected Code in Digital Control Systems". IRE Transactions on Electronic Computers. EC-3 (4): 1–6. doi:10.1109/IREPGELC.1954.6499244. ISSN 2168-1740. (6 pages)
- Evans, David Silvester (1958). "(unknown)". Transactions. Institute of Measurement and Control. 10–12: 87. (NB. The Watts code was called W.R.D. code or Watts Reflected Decimal to distinguish it from other codes used at Hilger & Watts Ltd.)
- Benjamin, P. W.; Nicholls, G. S. (1963). "3.2.2 Electromechanical Digitizers". Measurement of Neutron Spectra by Semi-Automatic Scanning of Recoil Protons in Photographic Emulsions. United Kingdom Atomic Energy Authority, Atomic Weapons Research Establishment, UK: U.S. Department of Energy. pp. 8–10, 19. AWRE Report No. NR 5/63. (23 pages)
- Klinkowski, James J. (1967-03-14) [1964-03-23]. "Electronic Diode Matrix Decoder Circuits". Detroit, Michigan, USA: Burroughs Corporation. Patent US3309695A. Serial No. 353845. Retrieved 2020-05-23. (5 pages)
- Klinkowski, James J. (1970-03-31) [1966-12-22]. "Binary-coded decimal signal converter". Detroit, Michigan, USA: Burroughs Corporation. Patent US3504363A. Serial No. Retrieved 2020-05-23. (7 pages)
- "(unknown)". Electrical Design News (EDN). Rogers Publishing Company. 12. 1967. ISSN 0012-7515.
- Tóth-Zentai, Györgyi (1979-10-05). "Some Problems Of Angular Rotational Digital Converters". Periodica Polytechnica Electrical Engineering. Department of Electronics Technology, Technical University, Budapest, Hungary. 23 (3–4): 265–270 [266]. Retrieved 2020-05-23. (NB. Shows a 6-digit Watts code.)
- Turvey, Jr., Frank P. (1958-07-29) [1956-05-17], Pulse-Count Coder, Nutley, New Jersey, USA: International Telephone and Telegraph Corporation, US2845617A. Serial No. 585494, retrieved 2020-05-23 (5 pages)
- Glixon, Harry Robert (March 1957). "Can You Take Advantage of the Cyclic Binary-Decimal Code?". Control Engineering (CtE). Technical Publishing Company. 4 (3): 87–91. ISSN 0010-8049. (5 pages)
- Borucki, Ludwig; Dittmann, J. (1966). "2.3 Gebräuchliche Codes in der digitalen Meßtechnik". Digitale Meßtechnik: Eine Einführung (in German) (1 ed.). Siemens Halske AG, Karlsruhe, Germany: Springer-Verlag. p. 15. doi:10.1007/978-3-662-00093-9. ISBN 978-3-662-00094-6. LCCN 65-28570. Title ID 1288. Retrieved 2020-06-24. (NB. Like Kämmerer, the authors describe a 6-bit 20-cyclic Glixon code.)
- Kämmerer, Wilhelm (May 1969). "II.15. Informationsdarstellung im Automaten". Written at Jena, Germany. In Frühauf, Hans; Kämmerer, Wilhelm; Schröder, Kurz; Winkler, Helmut (eds.). Digitale Automaten – Theorie, Struktur, Technik, Programmieren. Elektronisches Rechnen und Regeln (in German). 5 (1 ed.). Berlin, Germany: Akademie-Verlag GmbH. p. 173. License no. 202-100/416/69. Order no. 4666 ES 20 K 3. (NB. A second edition 1973 exists as well. Like Borucki and Dittmann, but without naming it Glixon code, the author creates a 20-cyclic tetradic code from Glixon code and a Glixon code variant with inverted high-order bit.)
- Paul, Matthias R. (1995-08-10) [1994]. "Unterbrechungsfreier Schleifencode" [Continuous loop code]. 1.02 (in German). Retrieved 2008-02-11. (NB. The author called this code Schleifencode (engl. "loop code"). It differs from Gray BCD code only in the encoding of state 0 to make it a cyclic unit-distance code for full-circle rotatory applications. Avoiding the all-zero code pattern allows for loop self-testing and to use the data lines for uninterrupted power distribution.)
- Klar, Rainer (1970-02-01). Digitale Rechenautomaten – Eine Einführung [Digital Computers – An Introduction]. Sammlung Göschen (in German). 1241/1241a (1 ed.). Berlin, Germany: Walter de Gruyter & Co. / G. J. Göschen'sche Verlagsbuchhandlung. p. 17. ISBN 3-11-083160-0. ISBN 978-3-11-083160-3. Archiv-Nr. 7990709. Archived from the original on 2020-06-01. Retrieved 2020-04-13. (205 pages) (NB. A 2019 reprint of the first edition is available under ISBN 3-11002793-3, 978-3-11002793-8. A reworked and expanded 4th edition exists as well.)
- Klar, Rainer (1989) [1988-10-01]. Digitale Rechenautomaten – Eine Einführung in die Struktur von Computerhardware [Digital Computers – An Introduction into the structure of computer hardware]. Sammlung Göschen (in German). 2050 (4th reworked ed.). Berlin, Germany: Walter de Gruyter & Co. p. 28. ISBN 3-11011700-2. ISBN 978-3-11011700-4. (320 pages) (NB. The author called this code Einheitsabstandscode (engl. "unit-distance code"). By swapping two bit columns and inverting one of them, it can be transferred into the [[#O'Brien II|O'Brien code II], whereas by swapping and inverting two bit columns, it can be transferred into the Petherick code.)
Further reading
- Richards, Richard Kohler (1955). Arithmetic Operations in Digital Computers (5 ed.). New York, USA: D. Van Nostrand Co., Inc.
- Black, Paul E. (2004-02-25). "Gray code". NIST.
- Press, William H.; Teukolsky, Saul A.; Vetterling, William T.; Flannery, Brian P. (2007). "Section 22.3. Gray Codes". Numerical Recipes: The Art of Scientific Computing (3rd ed.). New York, USA: Cambridge University Press. ISBN 978-0-521-88068-8.
- Savage, Carla Diane (1997). "A Survey of Combinatorial Gray Codes". SIAM Review. Society for Industrial and Applied Mathematics (SIAM). 39 (4): 605–629. CiteSeerX 10.1.1.39.1924. doi:10.1137/S0036144595295272. JSTOR 2132693.
- Wilf, Herbert Saul (1989). "Chapters 1–3". Combinatorial algorithms: An update. Society for Industrial and Applied Mathematics (SIAM). ISBN 0-89871-231-9. ISBN 978-0-89871-231-5.
- Dewar, Megan; Stevens, Brett (2012-08-29). Ordering Block Designs - Gray Codes, Universal Cycles and Configuration. CMS Books in Mathematics (1 ed.). New York, USA: Springer Science+Business Media. doi:10.1007/978-1-4614-4325-4. ISBN 978-1-46144324-7. ISSN 1613-5237. ISBN 1-46144324-5.
- Maxfield, Clive "Max" (2012-10-01) [2011-05-28]. "Gray Code Fundamentals". Design How-To. EETimes. Part 1. Archived from the original on 2017-10-30. Retrieved 2017-10-30. Part 2 Part 3
- Warren, Jr., Henry S. (2013). "Chapter 13: Gray Code". Hacker's Delight (2 ed.). Addison Wesley - Pearson Education, Inc. pp. 311–317. ISBN 978-0-321-84268-8. (7 pages)
- Zinovik, Igor; Kroening, Daniel; Chebiryak, Yury (2008-03-21). "Computing Binary Combinatorial Gray Codes Via Exhaustive Search With SAT Solvers". IEEE Transactions on Information Theory. IEEE. 54 (4): 1819–1823. doi:10.1109/TIT.2008.917695. hdl:20.500.11850/11304. (5 pages)
- O'Brien, Joseph A. (June 1957). "Unit-Distance Binary-Decimal Code Translators". IRE Transactions on Electronic Computers. EC-6 (2): 122–123. doi:10.1109/TEC.1957.5221585. ISSN 0367-9950. Retrieved 2020-05-25. (2 pages)
External links
- "Gray Code" demonstration by Michael Schreiber, Wolfram Demonstrations Project (with Mathematica implementation). 2007.
- NIST Dictionary of Algorithms and Data Structures: Gray code.
- Hitch Hiker's Guide to Evolutionary Computation, Q21: What are Gray codes, and why are they used?, including C code to convert between binary and BRGC.
- Dragos A. Harabor uses Gray codes in a 3D digitizer.
- Single-track gray codes, binary chain codes (Lancaster 1994), and linear feedback shift registers are all useful in finding one's absolute position on a single-track rotary encoder (or other position sensor).
- AMS Column: Gray codes
- Optical Encoder Wheel Generator
- ProtoTalk.net – Understanding Quadrature Encoding – Covers quadrature encoding in more detail with a focus on robotic applications