Transient response
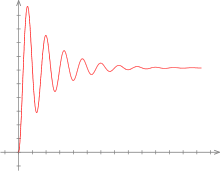
Damped oscillation is a typical transient response, where the output value oscillates until finally reaching a steady-state value (The underdamped response case).
In electrical engineering and mechanical engineering, a transient response is the response of a system to a change from an equilibrium or a steady state. The transient response is not necessarily tied to abrupt events but to any event that affects the equilibrium of the system. The impulse response and step response are transient responses to a specific input (an impulse and a step, respectively).
Damping
The response can be classified as one of three types of damping that describes the output in relation to the steady-state response.
- Underdamped
- An underdamped response is one that oscillates within a decaying envelope. The more underdamped the system, the more oscillations and longer it takes to reach steady-state. Here damping ratio is always less than one.
- Critically damped
- A critically damped response is that response which reaches the steady-state value the fastest without being underdamped. It is related to critical points in the sense that it straddles the boundary of underdamped and overdamped responses. Here, damping ratio is always equal to one. There should be no oscillation about the steady state value in the ideal case.
- Overdamped
- An overdamped response is the response that does not oscillate about the steady-state value but takes longer to reach steady-state than the critically damped case. Here damping ratio is greater than one.
Properties
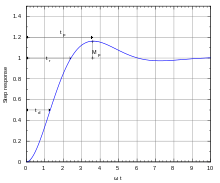
Typical second order transient system properties
Transient response can be quantified with the following properties.
- Rise time
- Rise time refers to the time required for a signal to change from a specified low value to a specified high value. Typically, these values are 10% and 90% of the step height.
- Overshoot
- Overshoot is when a signal or function exceeds its target. It is often associated with ringing.
- Settling time
- Settling time is the time elapsed from the application of an ideal instantaneous step input to the time at which the output has entered and remained within a specified error band.
- Delay-time
- The delay time is the time required for the response to reach half the final value the very first time.[1]
- Peak time
- The peak time is the time required for the response to reach the first peak of the overshoot.[1]
- Steady-state error
- 2003's Instrument Engineers' Handbook defines the steady-state error of a system as "the difference between the desired final output and the actual one" when the system reaches a steady state, when its behavior may be expected to continue if the system is undisturbed.[2]
See also
References
This article is issued from
Wikipedia.
The text is licensed under Creative Commons - Attribution - Sharealike.
Additional terms may apply for the media files.