Setpoint (control system)
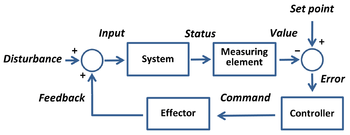
In cybernetics and control theory, a setpoint (also set point, set-point) is the desired or target value for an essential variable, or process value of a system.[1] Departure of such a variable from its setpoint is one basis for error-controlled regulation using negative feedback for automatic control. [2]. The set point is usually abbreviated to SP, and the process value is usually abbreviated to PV.[3]
Examples
Cruise Control
The SP-PV error can be used to return a system to its norm. An everyday example is the cruise control on a road vehicle; where external influences such as gradients cause speed changes (PV), and the driver also alters the desired set speed (SP). The automatic control algorithm restores the actual speed to the desired speed in the optimum way, without delay or overshoot, by altering the power output of the vehicle's engine. In this way the SP-PV error is used to control the PV so that it equals the SP. A widespread use of SP-PV error control is the PID controller.
Industrial Applications
Special consideration must be given for engineering applications. In industrial systems, physical or process restraints may limit the determined set point. For example, a reactor which operates more efficiently at higher temperatures may be rated to withstand 500°C. However, for safety reasons, the set point for the reactor temperature control loop would be well below this limit, even if this means the reactor is running less efficiently.
See also
References
- ↑ An 'essential variable' is defined as "a variable that has to be kept within assigned limits to achieve a particular goal": Jan Achterbergh, Dirk Vriens (2010). "§2.3 Cybernetics: Effective methods for the control of complex systems". Organizations: Social Systems Conducting Experiment. Springer Science & Business Media. p. 47. ISBN 9783642143168.
- ↑ W. Ross Ashby (1957). "Chapter 12: The error-controlled regulator". Introduction to cybernetics (PDF). Chapman & Hall Ltd.; Internet (1999). pp. 219–243.
- ↑ B. Wayne Bequette (2003). Process Control: Modeling, Design, and Simulation. Prentice Hall Professional. p. 5. ISBN 9780133536409.