Sight reduction
Sight reduction is the process of deriving from a sight the information needed for establishing a line of position.
Sight is defined as the observation of the altitude, and sometimes also the azimuth, of a celestial body for a line of position; or the data obtained by such observation.[1]
Nowadays sight reduction uses the equation of the circle of equal altitude to calculate the altitude of the celestial body,

and the azimuth is obtained from by:



With the observed altitude , and are the parameters of the Marcq St Hilaire (Intercept method) intercept for the line of position:




With the latitude (North - positive, South - negative), the longitude (East - positive, West - negative), is the local hour angle, and are the declination and Greenwich hour angle of the body observed, and the calculated altitude. is the calculated azimuth of the body.





Basic procedures involved computer sight reduction or longhand tabular methods.
Tabular sight reduction
The methods included are:
- The Nautical Almanac Sight Reduction (NASR, originally known as Concise Tables for Sight Reduction or Davies, 1984, 22pg)
- Pub. 249 (formerly H.O. 249, Sight Reduction Tables for Air Navigation, A.P. 3270 in the UK, 1947–53, 1+2 volumes)[2]
- Pub. 229 (formerly H.O. 229, Sight Reduction Tables for Marine Navigation, H.D. 605/NP 401 in the UK, 1970, 6 volumes.[3]
- The variant of HO-229: Sight Reduction Tables for Small Boat Navigation, known as Schlereth, 1983, 1 volume)
- H.O. 214 (Tables of Computed Altitude and Azimuth, H.D. 486 in the UK, 1936–46, 9 vol.)
- H.O. 211 (Dead Reckoning Altitude and Azimuth Table, known as Ageton, 1931, 36pg. And 2 variants of H.O. 211: Compact Sight Reduction Table, also known as Ageton–Bayless, 1980, 9+ pg. S-Table, also known as Pepperday, 1992, 9+ pg.)
- H.O. 208 (Navigation Tables for Mariners and Aviators, known as Dreisonstok, 1928, 113pg.)
Longhand haversine sight reduction
This method is a practical procedure to reduce celestial sights with the needed accuracy, without using electronic tools such as calculator or a computer. And it could serve as a backup in case of malfunction of the positioning system aboard.
Doniol
The first approach of a compact and concise method was published by R. Doniol in 1955[4] and involved haversines. The altitude is derived from , in which , , .




The calculation is:
n = cos(Lat − Dec) m = cos(Lat + Dec) a = hav(LHA) Hc = arcsin(n − a ⋅ (m + n))
Ultra compact sight reduction

A practical and friendly method using only haversines was developed between 2014 and 2015,[5] and published in NavList.
A compact expression for the altitude was derived[6] using haversines, , for all the terms of the equation:


where is the zenith distance,

is the calculated altitude.

The algorithm if absolute values are used is:
if same name for latitude and declination (both are North or South) n = hav(|Lat| − |Dec|) m = hav(|Lat| + |Dec|) if contrary name (one is North the other is South) n = hav(|Lat| + |Dec|) m = hav(|Lat| − |Dec|) q = n + m a = hav(LHA) hav(ZD) = n + a · (1 − q) ZD = archav() -> inverse look-up at the haversine tables Hc = 90° − ZD
For the azimuth a diagram[7] was developed for a faster solution without calculation, and with an accuracy of 1°.
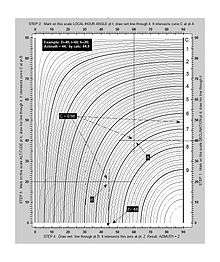
This diagram could be used also for star identification.[8]
An ambiguity in the value of azimuth may arise since in the diagram . is E↔W as the name of the meridian angle, but the N↕S name is not determined. In most situations azimuth ambiguities are resolved simply by observation.

When there are reasons for doubt or for the purpose of checking the following formula[9] should be used:

The algorithm if absolute values are used is:
if same name for latitude and declination (both are North or South) a = hav(90° − |Dec|) if contrary name (one is North the other is South) a = hav(90° + |Dec|) m = hav(|Lat| + Hc) n = hav(|Lat| − Hc) q = n + m hav(Z) = (a − n) / (1 − q) Z = archav() -> inverse look-up at the haversine tables if Latitude N: if LHA > 180°, Zn = Z if LHA < 180°, Zn = 360° − Z if Latitude S: if LHA > 180°, Zn = 180° − Z if LHA < 180°, Zn = 180° + Z
This computation of the altitude and the azimuth needs a haversine table. For a precision of 1 minute of arc, a four figure table is enough.[10][11]
An example
Data: Lat = 34° 10.0′ N (+) Dec = 21° 11.0′ S (−) LHA = 57° 17.0′ Altitude Hc: a = 0.2298 m = 0.0128 n = 0.2157 hav(ZD) = 0.3930 ZD = archav(0.3930) = 77° 39′ Hc = 90° - 77° 39′ = 12° 21′ Azimuth Zn: a = 0.6807 m = 0.1560 n = 0.0358 hav(Z) = 0.7979 Z = archav(0.7979) = 126.6° Because LHA < 180° and Latitude is North: Zn = 360° - Z = 233.4°
References
- The American Practical Navigator (2002)
- Pub. 249 Volume 1. Stars; Pub. 249 Volume 2. Latitudes 0° to 39°; Pub. 249 Volume 3. Latitudes 40° to 89°
- Pub. 229 Volume 1. Latitudes 0° to 15°; Pub. 229 Volume 2. Latitudes 15° to 30°; Pub. 229 Volume 3. Latitudes 30° to 45°; Pub. 229 Volume 4. Latitudes 45° to 60°; Pub. 229 Volume 5. Latitudes 60° to 75°; Pub. 229 Volume 6. Latitudes 75° to 90°.
- Table de point miniature (Hauteur et azimut), by R. Doniol, Navigation IFN Vol. III Nº 10, Avril 1955 Paper
- Rudzinski, Greg (July 2015). Ix, Hanno. "Ultra compact sight reduction". Ocean Navigator. Portland, ME, USA: Navigator Publishing LLC (227): 42–43. ISSN 0886-0149. Retrieved 2015-11-07.
- Altitude haversine formula by Hanno Ix http://fer3.com/arc/m2.aspx/Longhand-Sight-Reduction-HannoIx-nov-2014-g29121
- Azimuth diagram by Hanno Ix. http://fer3.com/arc/m2.aspx/Gregs-article-havDoniol-Ocean-Navigator-HannoIx-jun-2015-g31689
- Hc by Azimuth Diagram http://fer3.com/arc/m2.aspx/Hc-Azimuth-Diagram-finally-HannoIx-aug-2013-g24772
- Azimuth haversine formula by Lars Bergman http://fer3.com/arc/m2.aspx/Longhand-Sight-Reduction-Bergman-nov-2014-g29441
- http://fer3.com/arc/m2.aspx/Longhand-Sight-Reduction-HannoIx-nov-2014-g29172
- Natural-Haversine 4-place Table; PDF; 51kB
External links
- Navigational Algorithms: resources for Longhand Haversine Sight Reduction
- NavList A Community Devoted to the Preservation and Practice of Celestial Navigation and Other Methods of Traditional Position-Finding
- Celestial Tools for the USPS/CPS JN/N Student
- Graphical all-haversine Hc reduction
- Sight Reduction - free App for android