Robostrider
Robostrider is a self-propelled robot which uses similar mechanisms to real water striders in order to glide along the surface of the water. It was developed at Cambridge, Massachusetts.[1]
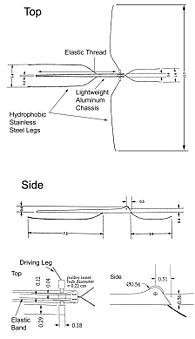
Schematic diagram of robostrider
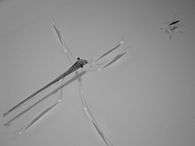
Robostrider faces its biological counterpart
Robostrider does not break the surface layer of the water despite leg speeds of 18 centimetres per second (7.1 in/s) it generates both capillary waves and vortices while in motion, as do Gerridae. Hu and Bush state that Robostrider moves "in a style less elegant than its natural counterpart" [1] but point out that it can cover 20 centimetres (7.9 in) in five strides, with one winding.
See also
- Animal locomotion on the surface layer of water.
References
- David L. Hu and John W. M, Bush (2003). "The hydrodynamics of water strider locomotion". Nature. 424 (6949): 663–666. doi:10.1038/nature01793. PMID 12904790.
External links
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.