Humanoid robot
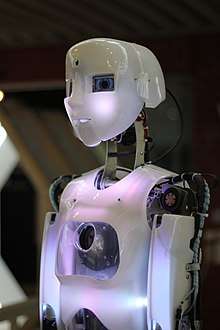
A humanoid robot is a robot with its body shape built to resemble the human body. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of al locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some forms of humanoid robots may model only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.
Purpose



Humanoid robots are now used as research tools in several scientific areas.
Researchers study the human body structure and behavior (biomechanics) to build humanoid robots. On the other side, the attempt to simulate the human body leads to a better understanding of it. Human cognition is a field of study which is focused on how humans learn from sensory information in order to acquire perceptual and motor skills. This knowledge is used to develop computational models of human behavior and it has been improving over time.
It has been suggested that very advanced robotics will facilitate the enhancement of ordinary humans. See transhumanism.
Although the initial aim of humanoid research was to build better orthosis and prosthesis for human beings, knowledge has been transferred between both disciplines. A few examples are powered leg prosthesis for neuromuscularly impaired, ankle-foot orthosis, biological realistic leg prosthesis and forearm prosthesis.
Besides the research, humanoid robots are being developed to perform human tasks like personal assistance, through which they should be able to assist the sick and elderly, and dirty or dangerous jobs. Humanoids are also suitable for some procedurally-based vocations, such as reception-desk administrators and automotive manufacturing line workers. In essence, since they can use tools and operate equipment and vehicles designed for the human form, humanoids could theoretically perform any task a human being can, so long as they have the proper software. However, the complexity of doing so is immense.
They are also becoming increasingly popular as entertainers. For example, Ursula, a female robot, sings, plays music, dances and speaks to her audiences at Universal Studios. Several Disney theme park shows utilize animatronic robots that look, move and speak much like human beings. Although these robots look realistic, they have no cognition or physical autonomy. Various humanoid robots and their possible applications in daily life are featured in an independent documentary film called Plug & Pray, which was released in 2010.
Humanoid robots, especially those with artificial intelligence algorithms, could be useful for future dangerous and/or distant space exploration missions, without having the need to turn back around again and return to Earth once the mission is completed.
Sensors
A sensor is a device that measures some attribute of the world. Being one of the three primitives of robotics (besides planning and control), sensing plays an important role in robotic paradigms.
Sensors can be classified according to the physical process with which they work or according to the type of measurement information that they give as output. In this case, the second approach was used.
Proprioceptive sensors
Proprioceptive sensors sense the position, the orientation and the speed of the humanoid's body and joints.
In human beings the otoliths and semi-circular canals (in the inner ear) are used to maintain balance and orientation. In addition humans use their own proprioceptive sensors (e.g. touch, muscle extension, limb position) to help with their orientation. Humanoid robots use accelerometers to measure the acceleration, from which velocity can be calculated by integration; tilt sensors to measure inclination; force sensors placed in robot's hands and feet to measure contact force with environment; position sensors, that indicate the actual position of the robot (from which the velocity can be calculated by derivation) or even speed sensors.
Exteroceptive sensors

Arrays of tactels can be used to provide data on what has been touched. The Shadow Hand uses an array of 34 tactels arranged beneath its polyurethane skin on each finger tip.[3] Tactile sensors also provide information about forces and torques transferred between the robot and other objects.
Vision refers to processing data from any modality which uses the electromagnetic spectrum to produce an image. In humanoid robots it is used to recognize objects and determine their properties. Vision sensors work most similarly to the eyes of human beings. Most humanoid robots use CCD cameras as vision sensors.
Sound sensors allow humanoid robots to hear speech and environmental sounds, and perform as the ears of the human being. Microphones are usually used for this task.
Actuators
Actuators are the motors responsible for motion in the robot.
Humanoid robots are constructed in such a way that they mimic the human body, so they use actuators that perform like muscles and joints, though with a different structure. To achieve the same effect as human motion, humanoid robots use mainly rotary actuators. They can be either electric, pneumatic, hydraulic, piezoelectric or ultrasonic.
Hydraulic and electric actuators have a very rigid behavior and can only be made to act in a compliant manner through the use of relatively complex feedback control strategies. While electric coreless motor actuators are better suited for high speed and low load applications, hydraulic ones operate well at low speed and high load applications.
Piezoelectric actuators generate a small movement with a high force capability when voltage is applied. They can be used for ultra-precise positioning and for generating and handling high forces or pressures in static or dynamic situations.
Ultrasonic actuators are designed to produce movements in a micrometer order at ultrasonic frequencies (over 20 kHz). They are useful for controlling vibration, positioning applications and quick switching.
Pneumatic actuators operate on the basis of gas compressibility. As they are inflated, they expand along the axis, and as they deflate, they contract. If one end is fixed, the other will move in a linear trajectory. These actuators are intended for low speed and low/medium load applications. Between pneumatic actuators there are: cylinders, bellows, pneumatic engines, pneumatic stepper motors and pneumatic artificial muscles.
Planning and control
In planning and control, the essential difference between humanoids and other kinds of robots (like industrial ones) is that the movement of the robot has to be human-like, using legged locomotion, especially biped gait. The ideal planning for humanoid movements during normal walking should result in minimum energy consumption, as it does in the human body. For this reason, studies on dynamics and control of these kinds of structures has become increasingly important.
The question of walking biped robots stabilization on the surface is of great importance. Maintenance of the robot’s gravity center over the center of bearing area for providing a stable position can be chosen as a goal of control.[4]
To maintain dynamic balance during the walk, a robot needs information about contact force and its current and desired motion. The solution to this problem relies on a major concept, the Zero Moment Point (ZMP).
Another characteristic of humanoid robots is that they move, gather information (using sensors) on the "real world" and interact with it. They don’t stay still like factory manipulators and other robots that work in highly structured environments. To allow humanoids to move in complex environments, planning and control must focus on self-collision detection, path planning and obstacle avoidance.
Humanoid robots do not yet have some features of the human body. They include structures with variable flexibility, which provide safety (to the robot itself and to the people), and redundancy of movements, i.e. more degrees of freedom and therefore wide task availability. Although these characteristics are desirable to humanoid robots, they will bring more complexity and new problems to planning and control. The field of whole-body control deals with these issues and addresses the proper coordination of numerous degrees of freedom, e.g. to realize several control tasks simultaneously while following a given order of priority.[5]
Timeline of developments
| Year | Development |
|---|---|
| c. 250 BC | The Liezi described an automaton.[6] |
| c. 50 AD | Greek mathematician Hero of Alexandria described a machine that automatically pours wine for party guests.[7] |
| 1206 | Al-Jazari described a band made up of humanoid automata which, according to Charles B. Fowler, performed "more than fifty facial and body actions during each musical selection."[8] Al-Jazari also created hand washing automata with automatic humanoid servants,[9] and an elephant clock incorporating an automatic humanoid mahout striking a cymbal on the half-hour. His programmable "castle clock" also featured five musician automata which automatically played music when moved by levers operated by a hidden camshaft attached to a water wheel.[10] |
| 1495 | Leonardo da Vinci designs a humanoid automaton that looks like an armored knight, known as Leonardo's robot.[11] |
| 1738 | Jacques de Vaucanson builds The Flute Player, a life-size figure of a shepherd that could play twelve songs on the flute and The Tambourine Player that played a flute and a drum or tambourine.[12] |
| 1774 | Pierre Jacquet-Droz and his son Henri-Louis created the Draughtsman, the Musicienne and the Writer, a figure of a boy that could write messages up to 40 characters long.[13] |
| 1898 |
Nikola Tesla publicly demonstrates his "automaton" technology by wirelessly controlling a model boat at the Electrical Exposition held at Madison Square Garden in New York City during the height of the Spanish–American War. |
| 1921 | Czech writer Karel Čapek introduced the word "robot" in his play R.U.R. (Rossum's Universal Robots). The word "robot" comes from the word "robota", meaning, in Czech and Polish, "labour, drudgery".[11] |
| 1927 | The Maschinenmensch ("machine-human"), a gynoid humanoid robot, also called "Parody", "Futura", "Robotrix", or the "Maria impersonator" (played by German actress Brigitte Helm), perhaps the most memorable humanoid robot ever to appear on film, is depicted in Fritz Lang's film Metropolis. |
| 1928 | The electrical robot Eric opens an exhibition of the Society of Model Engineers at London's Royal Horticultural Hall in London, and tours the world |
| 1941-42 | Isaac Asimov formulates the Three Laws of Robotics, used in his robot science fiction stories, and in the process of doing so, coins the word "robotics". |
| 1948 | Norbert Wiener formulates the principles of cybernetics, the basis of practical robotics. |
| 1961 | The first digitally operated and programmable non-humanoid robot, the Unimate, is installed on a General Motors assembly line to lift hot pieces of metal from a die casting machine and stack them. It was created by George Devol and constructed by Unimation, the first robot manufacturing company. |
| 1967 to 1972 | Waseda University initiated the WABOT project in 1967, and in 1972 completed the WABOT-1, the world's first full-scale humanoid intelligent robot.[14][15] It was the first android, able to walk, communicate with a person in Japanese (with an artificial mouth), measure distances and directions to the objects using external receptors (artificial ears and eyes), and grip and transport objects with hands.[16][17][18] |
| 1969 | D.E. Whitney publishes his article "Resolved motion rate control of manipulators and human prosthesis".[19] |
| 1970 | Miomir Vukobratović has proposed Zero Moment Point, a theoretical model to explain biped locomotion.[20] |
| 1972 | Miomir Vukobratović and his associates at Mihajlo Pupin Institute build the first active anthropomorphic exoskeleton. |
| 1980 | Marc Raibert established the MIT Leg Lab, which is dedicated to studying legged locomotion and building dynamic legged robots.[21] |
| 1983 | Using MB Associates arms, "Greenman" was developed by Space and Naval Warfare Systems Center, San Diego. It had an exoskeletal master controller with kinematic equivalency and spatial correspondence of the torso, arms, and head. Its vision system consisted of two 525-line video cameras each having a 35-degree field of view and video camera eyepiece monitors mounted in an aviator's helmet.[22] |
| 1984 | At Waseda University, the Wabot-2 is created, a musician humanoid robot able to communicate with a person, read a normal musical score with his eyes and play tunes of average difficulty on an electronic organ.[16] |
| 1985 | Developed by Hitachi Ltd, WHL-11 is a biped robot capable of static walking on a flat surface at 13 seconds per step and it can also turn.[16] |
| 1985 | WASUBOT is another musician robot from Waseda University. It performed a concerto with the NHK Symphony Orchestra at the opening ceremony of the International Science and Technology Exposition. |
| 1986 | Honda developed seven biped robots which were designated E0 (Experimental Model 0) through E6. E0 was in 1986, E1 – E3 were done between 1987 and 1991, and E4 - E6 were done between 1991 and 1993.[23] |
| 1989 | Manny was a full-scale anthropomorphic robot with 42 degrees of freedom developed at Battelle's Pacific Northwest Laboratories in Richland, Washington, for the US Army's Dugway Proving Ground in Utah. It could not walk on its own but it could crawl, and had an artificial respiratory system to simulate breathing and sweating.[16] |
| 1990 | Tad McGeer showed that a biped mechanical structure with knees could walk passively down a sloping surface.[24] |
| 1993 | Honda developed P1 (Prototype Model 1) through P3, an evolution from E series, with upper limbs. Developed until 1997.[23] |
| 1995 | Hadaly was developed in Waseda University to study human-robot communication and has three subsystems: a head-eye subsystem, a voice control system for listening and speaking in Japanese, and a motion-control subsystem to use the arms to point toward campus destinations. |
| 1995 | Wabian is a human-size biped walking robot from Waseda University. |
| 1996 | Saika, a light-weight, human-size and low-cost humanoid robot, was developed at Tokyo University. Saika has a two-DOF neck, dual five-DOF upper arms, a torso and a head. Several types of hands and forearms are under development also. Developed until 1998.[16] |
| 1997 | Hadaly-2, developed at Waseda University, is a humanoid robot which realizes interactive communication with humans. It communicates not only informationally, but also physically. |
| 2000 | Honda creates its 11th bipedal humanoid robot, able to run, ASIMO.[23] |
| 2001 | Sony unveils small humanoid entertainment robots, dubbed Sony Dream Robot (SDR). Renamed Qrio in 2003. |
| 2001 | Fujitsu realized its first commercial humanoid robot named HOAP-1. Its successors HOAP-2 and HOAP-3 were announced in 2003 and 2005, respectively. HOAP is designed for a broad range of applications for R&D of robot technologies.[25] |
| 2002 | HRP-2, biped walking robot built by the Manufacturing Science and Technology Center (MSTC) in Tokyo.[26] |
| 2003 | JOHNNIE, an autonomous biped walking robot built at the Technical University of Munich. The main objective was to realize an anthropomorphic walking machine with a human-like, dynamically stable gait.[27] |
| 2003 | Actroid, a robot with realistic silicone "skin" developed by Osaka University in conjunction with Kokoro Company Ltd.[28] |
| 2004 | Persia, Iran's first humanoid robot, was developed using realistic simulation by researchers of Isfahan University of Technology in conjunction with ISTT.[29] |
| 2004 | KHR-1, a programmable bipedal humanoid robot introduced in June 2004 by a Japanese company Kondo Kagaku. |
| 2005 | The PKD Android, a conversational humanoid robot made in the likeness of science fiction novelist Philip K Dick, was developed as a collaboration between Hanson Robotics, the FedEx Institute of Technology, and the University of Memphis.[30] |
| 2005 | Wakamaru, a Japanese domestic robot made by Mitsubishi Heavy Industries, primarily intended to provide companionship to elderly and disabled people.[31] |
| 2005 | The Geminoid series is a series of ultra-realistic humanoid robots or Actroid developed by Hiroshi Ishiguro of ATR and Kokoro in Tokyo. The original one, Geminoid HI-1 was made at its image. Followed Geminoid-F in 2010 and Geminoid-DK in 2011.[32] |
| 2006 | Nao is a small open source programmable humanoid robot developed by Aldebaran Robotics, in France. Widely used by worldwide universities as a research platform and educational tool.[32] |
| 2006 | RoboTurk is designed and realized by Dr Davut Akdas and Dr Sabri Bicakci at Balikesir University. This Research Project Sponsored By The Scientific And Technological Research Council Of Turkey (TUBITAK) in 2006. RoboTurk is successor of biped robots named "Salford Lady" and "Gonzalez" at university of Salford in the UK. It is the first humanoid robot supported by Turkish Government.[33] |
| 2006 | REEM-A was the first fully autonomous European biped humanoid robot, designed to play chess with the Hydra Chess engine. The first robot developed by PAL Robotics, it was also used as a walking, manipulation, speech and vision development platform.[34] |
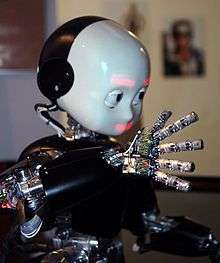
| 2006 | iCub, a biped humanoid open source robot for cognition research.[35] |
| 2006 | Mahru, a network-based biped humanoid robot developed in South Korea.[36] |
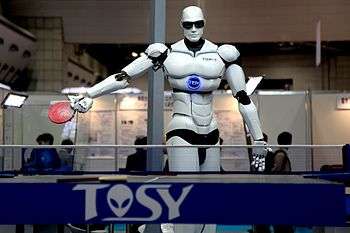
| 2007 | TOPIO, a ping pong playing robot developed by TOSY Robotics JSC.[37] |
| 2007 | Twendy-One, a robot developed by the WASEDA University Sugano Laboratory for home assistance services. It is not biped, as it uses an omni-directional mobile mechanism.[38] |
| 2008 | Justin, a humanoid robot developed by the German Aerospace Center (DLR).[39] |
| 2008 | KT-X, the first international humanoid robot developed as a collaboration between the five-time consecutive RoboCup champions, Team Osaka, and KumoTek Robotics.[40] |
| 2008 | Nexi, the first mobile, dexterous and social robot, makes its public debut as one of TIME magazine's top inventions of the year.[41] The robot was built through a collaboration between the MIT Media Lab Personal Robots Group,[42] UMass Amherst and Meka robotics.[43][44] |
| 2008 | Salvius, The first open source humanoid robot built in the United States is created. |
| 2008 | REEM-B, the second biped humanoid robot developed by PAL Robotics. It has the ability to autonomously learn its environment using various sensors and carry 20% of its own weight.[45] |
| 2008 | Surena, This robot was introduced in December 13, 2008. It had a height of 165 centimetres and weight of 60 kilograms, and is able to speak according to predefined text. It also has remote control and tracking ability. |
| 2009 | HRP-4C, a Japanese domestic robot made by National Institute of Advanced Industrial Science and Technology, shows human characteristics in addition to bipedal walking. |
| 2009 | Turkey's first dynamically walking humanoid robot, SURALP, is developed by Sabanci University in conjunction with Tubitak.[46] |
| 2009 | Kobian, a robot developed by WASEDA University can walk, talk and mimic emotions.[47] |
| 2009 | DARwIn-OP, an open source robot developed by ROBOTIS in collaboration with Virginia Tech, Purdue University, and University of Pennsylvania. This project was supported and sponsored by NSF. |
| 2010 | NASA and General Motors revealed Robonaut 2, a very advanced humanoid robot. It was part of the payload of Shuttle Discovery on the successful launch February 24, 2011. It is intended to do spacewalks for NASA.[48] |
| 2010 | Researchers at Japan's National Institute of Advanced Industrial Science and Technology demonstrate their humanoid robot HRP-4C singing and dancing along with human dancers.[49] |
| 2010 | In September the National Institute of Advanced Industrial Science and Technology also demonstrates the humanoid robot HRP-4. The HRP-4 resembles the HRP-4C in some regards but is called "athletic" and is not a gynoid. |
| 2010 | REEM, a humanoid service robot with a wheeled mobile base. Developed by PAL Robotics, it can perform autonomous navigation in various surroundings and has voice and face recognition capabilities.[50] |
| 2011 | Robot Auriga was developed by Ali Özgün HIRLAK and Burak Özdemir in 2011 at University of Cukurova. Auriga is the first brain controlled robot, designed in Turkey. Auriga can service food and medicine to paralysed people by patient's thoughts. EEG technology is adapted for manipulation of the robot. The project was supported by Turkish Government.[51] |
| 2011 | In November Honda unveiled its second generation Honda Asimo Robot. The all new Asimo is the first version of the robot with semi-autonomous capabilities. |
| 2012 | In April, the Advanced Robotics Department in Italian Institute of Technology released its first version of the COmpliant huMANoid robot COMAN which is designed for robust dynamic walking and balancing in rough terrain.[52] |
| 2013 | On December 20–21, 2013 DARPA Robotics Challenge ranked the top 16 humanoid robots competing for the US$2 million cash prize. The leading team, SCHAFT, with 27 out of a possible score of 30 was bought by Google.[53] PAL Robotics launches REEM-C the first humanoid biped robot developed as a robotics research platform 100% ROS based. |
| 2014 | Manav – India's first 3D printed humanoid robot developed in the laboratory of A-SET Training and Research Institutes by Diwakar Vaish (head Robotics and Research, A-SET Training and Research Institutes).[54] |
| 2014 | After the acquisition of Aldebaran, SoftBank Robotics releases the Pepper robot available for everyone. |
| 2015 | Nadine is a female humanoid social robot designed in Nanyang Technological University, Singapore, and modelled on its director Professor Nadia Magnenat Thalmann. Nadine is a socially intelligent robot which returns greetings, makes eye contact, and remembers all the conversations it has had. |
| 2015 | Sophia is a humanoid robot developed by "Hanson Robotics", Hong Kong, and modelled after Audrey Hepburn. Sophia has artificial intelligence, visual data processing and facial recognition. |
| 2016 | OceanOne, developed by a team at Stanford University, led by computer science professor Oussama Khatib, completes its first mission, diving for treasure in a shipwreck off the coast of France, at a depth of 100 meters. The robot is controlled remotely, has haptic sensors in its hands, and artificial intelligence capabilities.[55] |
| 2017 | PAL Robotics launches TALOS[56], a fully electrical humanoid robot with joint torque sensors and EtherCAT communication technology that can manipulate up to 6Kg payload in each of its grippers. |
Humanoid Robots portrayed in 21st-century films and television shows
.
In the selected 21st-century films and television shows, humanoid robots (sometimes also referred to as "synthetic humans" or "replicants") are portrayed which can transcend the "uncanny valley". Some of these films and television shows depict a future in which anyone can buy a humanoid robot, which has resulted in supposed improvements in many areas, including elderly care and social companionship.[57] These films and television shows score over 60% for the Average Tomatometer on Rotten Tomatoes.[58][59][60][61][62] Humanoid robots may be considered a threat by humans, especially if they become capable of simulating human consciousness.[63]
| TV Show | Average Tomatometer | Release Date | Seasons |
|---|---|---|---|
| Humans | 91% | 14 June 2015 | 3 (as of 19/05/2018) |
| Altered Carbon | 65% | 2 February 2018 | 1 (as of 19/05/2018) |
| Movie | Average Tomatometer | Release Date |
|---|---|---|
| Ex Machina | 92% | 7 May 2015 |
| Blade Runner 2049 | 87% | 5 October 2017 |
| Prometheus | 73% | 7 June 2012 |
Notes
- ↑ "A Ping-Pong-Playing Terminator". Popular Science. Archived from the original on 2011-03-29.
- ↑ "Best robot 2009". www.gadgetrivia.com. Archived from the original on July 24, 2010.
- ↑ "Shadow Robot Company: The Hand Technical Specification". Archived from the original on 2008-07-08. Retrieved 2009-04-09.
- ↑ Bazylev D.N.; et al. (2015). "Approaches for stabilizing of biped robots in a standing position on movable support". Scientific and Technical Journal of Information Technologies, Mechanics and Optics. 15 (3): 418. Archived from the original on 2015-07-08.
- ↑ Dietrich, A., Whole-Body Impedance Control of Wheeled Humanoid Robots, ISBN 978-3-319-40556-8, Springer International Publishing, 2016, "Archived copy". Archived from the original on 2017-09-07. Retrieved 2017-08-31.
- ↑ Joseph Needham (1986), Science and Civilization in China: Volume 2, p. 53, England: Cambridge University Press
- ↑ Hero of Alexandria; Bennet Woodcroft (trans.) (1851). Temple Doors opened by Fire on an Altar. Pneumatics of Hero of Alexandria. London: Taylor Walton and Maberly (online edition from University of Rochester, Rochester, NY). Retrieved on 2008-04-23.
- ↑ Fowler, Charles B. (October 1967), "The Museum of Music: A History of Mechanical Instruments", Music Educators Journal 54 (2): 45-9
- ↑ Rosheim, Mark E. (1994). Robot Evolution: The Development of Anthrobotics. Wiley-IEEE. pp. 9–10. ISBN 0-471-02622-0.
- ↑ "Ancient Discoveries, Episode 11: Ancient Robots". History Channel. Archived from the original on 2014-03-01. Retrieved 2008-09-06.
- 1 2 "MegaGiant Robotics". megagiant.com. Archived from the original on 2007-08-19.
- ↑ "Archived copy". Archived from the original on 2005-09-12. Retrieved 2005-09-12.
- ↑ "Archived copy". Archived from the original on 2006-05-22. Retrieved 2005-11-15.
- ↑ "Humanoid History -WABOT-". www.humanoid.waseda.ac.jp. Archived from the original on 1 September 2017. Retrieved 3 May 2018.
- ↑ Zeghloul, Saïd; Laribi, Med Amine; Gazeau, Jean-Pierre (21 September 2015). "Robotics and Mechatronics: Proceedings of the 4th IFToMM International Symposium on Robotics and Mechatronics". Springer. Retrieved 3 May 2018 – via Google Books.
- 1 2 3 4 5 "Historical Android Projects". androidworld.com. Archived from the original on 2005-11-25.
- ↑ Robots: From Science Fiction to Technological Revolution, page 130
- ↑ Duffy, Vincent G. (19 April 2016). "Handbook of Digital Human Modeling: Research for Applied Ergonomics and Human Factors Engineering". CRC Press. Retrieved 3 May 2018 – via Google Books.
- ↑ Resolved motion rate control of manipulators and human prostheses DE Whitney - IEEE Transactions on Man-Machine Systems, 1969
- ↑
- ↑ "Electric Dreams - Marc Raibert". robosapiens.mit.edu. Archived from the original on 8 May 2005. Retrieved 3 May 2018.
- ↑ "Archived copy". Archived from the original on 2005-10-19. Retrieved 2005-11-15.
- 1 2 3 "Honda|ASIMO|ロボット開発の歴史". honda.co.jp. Archived from the original on 2005-12-29.
- ↑ "droidlogic.com". droidlogic.com. Archived from the original on January 22, 2008.
- ↑ "Research & Development". Archived from the original on 2008-05-09.
- ↑ "Humanoid Robotics". Archived from the original on 2016-02-09.
- ↑ "Archived copy". Archived from the original on 2006-06-15. Retrieved 2007-12-07.
- ↑ "新サイトへ". kokoro-dreams.co.jp. Archived from the original on 2006-10-23.
- ↑ "Humanoid Robot - Dynamics and Robotics Center". Archived from the original on 2016-09-19.
- ↑ "PKD Android". pkdandroid.org. Archived from the original on 2009-10-01.
- ↑ "Archived copy". Archived from the original on 2007-07-01. Retrieved 2007-07-02.
- 1 2 "Aldebaran Robotics". Aldebaran Robotics. Archived from the original on 2010-06-14.
- ↑ Dr Davut Akdas, "Archived copy". Archived from the original on 2012-07-13. Retrieved 2013-07-10. , RoboTurk,
- ↑ Eduard Gamonal. "PAL Robotics — advanced full-size humanoid service robots for events and research world-wide". pal-robotics.com. Archived from the original on 2012-01-04.
- ↑ "iCub.org". icub.org. Archived from the original on 2010-07-16.
- ↑ Erico Guizzo. "Humanoid Robot Mahru Mimics a Person's Movements in Real Time". ieee.org. Archived from the original on 2012-10-20.
- ↑ Roxana Deduleasa (5 December 2007). "I, the Ping-Pong Robot!". softpedia. Archived from the original on 2 February 2009.
- ↑ 早稲田大学 理工学部 機械工学科 菅野研究室 TWENDYチーム. "TWENDY-ONE". twendyone.com. Archived from the original on 2012-12-21.
- ↑ redaktion dlr.de; db. "DLR Portal - Der Mensch im Mittelpunkt - DLR präsentiert auf der AUTOMATICA ein neues Chirurgie-System". dlr.de. Archived from the original on 2014-04-29.
- ↑ "Archived copy". Archived from the original on 2010-01-06. Retrieved 2009-09-05.
- ↑ "Best Inventions Of 2008". Time. 2008-10-29. Archived from the original on 2012-11-07.
- ↑ "Personal Robots Group". Archived from the original on 2010-04-14.
- ↑ "Meka Robotics LLC". Archived from the original on 2011-01-02.
- ↑ "Archived copy". Archived from the original on 2010-04-19. Retrieved 2010-04-27.
- ↑ Eduard Gamonal. "PAL Robotics — advanced full-size humanoid service robots for events and research world-wide". pal-robotics.com. Archived from the original on 2012-03-09.
- ↑ "humanoid robot project". sabanciuniv.edu. Archived from the original on 2010-04-22.
- ↑ "Japanese Humanoid Robot, Kobian, Walks, Talks, Crys and Laughs (VIDEO)". The Inquisitr News. Archived from the original on 2011-11-23.
- ↑ "Say Hello to Robonaut2, NASA's Android Space Explorer of the Future". Popular Science. Archived from the original on 2010-02-07.
- ↑ "How to Make a Humanoid Robot Dance". Archived from the original on 2010-11-07.
- ↑ Eduard Gamonal. "PAL Robotics — advanced full-size humanoid service robots for events and research world-wide". pal-robotics.com. Archived from the original on 2011-03-13.
- ↑ "'Türkler yapmış arkadaş' dedirttiler". MILLIYET HABER - TÜRKIYE'NIN HABER SITESI. 14 January 2012. Archived from the original on 6 January 2015.
- ↑ "COmpliant HuMANoid Platform (COMAN)". iit.it. Archived from the original on 2012-12-05.
- ↑ "Home". theroboticschallenge.org. Archived from the original on 2015-06-11.
- ↑ Menezes, Beryl. "Meet Manav, India's first 3D-printed humanoid robot". www.livemint.com. Archived from the original on 2015-09-29. Retrieved 2015-09-30.
- ↑ "How did a Stanford-designed 'humanoid' discover a vase from a Louis XIV shipwreck?". montereyherald.com. Archived from the original on 21 October 2017. Retrieved 3 May 2018.
- ↑ TALOS: A new humanoid research platform targeted for industrial applications
- ↑ "AMC's Humans Dives Headlong Into the Uncanny Valley". Maxim. Retrieved 2018-05-19.
- ↑ HUMANS, retrieved 2018-05-19
- ↑ Altered Carbon, retrieved 2018-05-19
- ↑ Ex Machina, retrieved 2018-05-19
- ↑ Blade Runner 2049, retrieved 2018-05-19
- ↑ Prometheus, retrieved 2018-05-19
- ↑ Reaney, Patricia. "Sci-fi TV series 'Humans' breathes new life into robot debate". U.S. Retrieved 2018-05-19.
References
- Asada, H. and Slotine, J.-J. E. (1986). Robot Analysis and Control. Wiley. ISBN 0-471-83029-1.
- Arkin, Ronald C. (1998). Behavior-Based Robotics. MIT Press. ISBN 0-262-01165-4.
- Brady, M., Hollerbach, J.M., Johnson, T., Lozano-Perez, T. and Mason, M. (1982), Robot Motion: Planning and Control. MIT Press. ISBN 0-262-02182-X.
- Horn, Berthold, K. P. (1986). Robot Vision. MIT Press. ISBN 0-262-08159-8.
- Craig, J. J. (1986). Introduction to Robotics: Mechanics and Control. Addison Wesley. ISBN 0-201-09528-9.
- Everett, H. R. (1995). Sensors for Mobile Robots: Theory and Application. AK Peters. ISBN 1-56881-048-2.
- Kortenkamp, D., Bonasso, R., Murphy, R. (1998). Artificial Intelligence and Mobile Robots. MIT Press. ISBN 0-262-61137-6.
- Poole, D., Mackworth, A. and Goebel, R. (1998), Computational Intelligence: A Logical Approach. Oxford University Press. ISBN 0-19-510270-3.
- Russell, R. A. (1990). Robot Tactile Sensing. Prentice Hall. ISBN 0-13-781592-1.
- Russell, S. J. & Norvig, P. (1995). Artificial Intelligence: A Modern Approach. Prentice-Hall. Prentice Hall. ISBN 0-13-790395-2. http://www.techentice.com/manav-indias-first-3d-printed-robot-from-iit-mumbai/ http://www.livemint.com/Industry/rc86Iu7h3rb44087oDts1H/Meet-Manav-Indias-first-3Dprinted-humanoid-robot.html
Further reading
- Carpenter, J., Davis, J., Erwin‐Stewart, N., Lee. T., Bransford, J. & Vye, N. (2009). Gender representation in humanoid robots for domestic use. International Journal of Social Robotics (special issue). 1 (3), 261‐265.The Netherlands: Springer.
- Carpenter, J., Davis, J., Erwin‐Stewart, N., Lee. T., Bransford, J. & Vye, N. (2008). Invisible machinery in function, not form: User expectations of a domestic humanoid robot. Proceedings of 6th conference on Design and Emotion. Hong Kong, China.
- Williams, Karl P. (2004). Build Your Own Human Robots: 6 Amazing and Affordable Projects. McGraw-Hill/TAB Electronics. ISBN 0-07-142274-9. ISBN 978-0-07-142274-1.
External links
| Wikimedia Commons has media related to Humanoid robots. |
- Humanoid Robots' jobs in Japan
- Ulrich Hottelet: Albert is not happy - How robots learn to live with people, African Times, June 2009
| Gynoids | |
|---|---|
| Male (androids) | |
| Babies and children | |
| See also | |
| |
| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Research | ||
| Related | ||
| ||