Introduction
Astrodynamics or Orbital Mechanics is mainly concerned with motions under gravity, either purely as a single force, or in combination with forces like thrust, drag, lift, light pressure, and others. As a topic it has a long history, with the motions of the planets, Moon, and Sun studied since ancient times, and with a scientific base starting about 500 years ago. With the advent of human-built spacecraft it has shifted from merely observing the motions of natural bodies, to planning and executing missions. The relevance to Space Systems engineering is, of course, the need to travel to a desired destination or orbit.
We will present some of the key ideas here. A more detailed and advanced introduction can be found in the Wikibook Astrodynamics and a set of Wikipedia articles at Astrodynamics - A Compendium. A good introductory printed textbook is Fundamentals of Astrodynamics, and there is an MIT Astrodynamics open course with downloadable materials.
Orbits
Gravity has no limiting distance, and therefore every object in the Universe is affected by the gravity of every other object in the Universe. For practical purposes, the force of gravity from most of the Universe cancels out, since there is about the same amount of material in all directions. What remains are more massive and nearby objects, whose gravity is large enough to matter for a given calculation. Which objects matter depends on how accurate your result needs to be. Typically detailed calculations are done with a computer simulation, since objects in general follow orbits, and move in relation to each other. Therefore the strength and direction of their gravity varies.
An Orbit is the path that an object will follow when only affected by gravity. Orbits around uniform single bodies are Conic Sections, which are shapes generated by slicing a cone. In order of eccentricity these are circle, ellipse, parabola, and hyperbola. Circular and elliptical orbits are bound to the body being orbited and will repeat. Parabolic and hyperbolic orbits are not bound to the body, although influenced by its gravity. They will not repeat. Simple orbit calculations only consider the nearest massive body. This is suitable when that body's attraction is much greater than other bodies, and for short time periods. More detailed and accurate calculations have to consider non-uniformity of the main body, and other bodies with enough gravity to influence the accuracy of the result.
First let's consider the ideal case of a single uniform massive object being orbited. Circular orbits have a constant velocity and distance from the center of mass of the body. This also means they have a constant Orbital Period, the time to complete one revolution around the body and return to the starting point. The circular orbit velocity, vo, for any body can be found from:

Where G is the Gravitational constant (6.67 x 10-11 Nm2/s2), M is the Mass of the body orbited (in kg), and r is the radius to the center of the body orbited (in meters). G is a universal constant, and the mass of the Earth is essentially constant (neglecting falling meteors, atmosphere leakage, and things we launch away from Earth), so often the product GM = K = 3.986 x 10^14 m3/s2 is used.
The orbital period, of a small body orbiting a central body in a circular or elliptic orbit is


Escape velocity, the velocity required to escape from a body's gravity to infinity, or ve is found by

Since this formula is the same as that for circular orbit, except by a factor of 2 in the square root term, escape velocity is the square root of 2 (1.414+) times circular orbit velocity. Elliptical orbits will have a velocity at the nearest point to the body, or periapsis, in between that of circular and escape.
Orbital Elements
Orbital Elements are the parameters required to fully describe the location and orientation of an orbit, the shape of the orbit, and the position of an orbiting object at a given time. They are described relative to the major body the object orbits. These elements change over time under the gravitational influence of other objects, which is called Perturbation, non-ideal shape and mass distribution of the major body, the effects of relativity, and outside forces like drag and light pressure. The more important elements include:
Axes - Periodic orbits are generally ellipses. An ellipse has a major and minor axis, which are the longest and shortest distances across the center of the ellipse. These axes are perpendicular to each other (see section 1.1 page 2 ). Half of these axes, or the distances from center to edge of the ellipse, are called the Semi-major and Semi-minor axes respectively, with symbols a and b. The Semi-major axis is the value usually used to describe the overall size of an orbit.
Eccentricity - The foci of an ellipse are the points along the Semi-major axis such that the sum of the distances from the foci to any point on the ellipse is constant. An orbit of a small body around a more massive one will have the massive one located at one focus of the elliptical orbit. The Focal length, f, is the distance from a focus to the center of the ellipse. The shape of the orbit is measured by Eccentricity, e, which is defined as:

The higher the eccentricity, the narrower is the ellipse relative to the semi-major axis, and the greater the difference between the nearest and farthest points of the body from the one it is orbiting.
Periapsis and Apoapsis - The prefixes peri- and ap- refer to the nearest and farthest points of an orbit from the center of the body being orbited. Different suffixes are used to indicate what body is being orbited, such as perigee and apogee for the lowest and highest points of an Earth orbit, and perihelion and aphelion for distance from the Sun. The general symbols are q for perigee and Q for apogee, and can be found from the formulas:



Lagrangian Points

Given two large bodies, such as the Sun and Jupiter, and a third small body, such as an asteroid, there are five points relative to the large bodies where the net forces keep the small body approximately in the same position relative to the two larger ones. They are called the Lagrangian Points after one of the mathematicians who discovered them. Three of these, called L1, L2, and L3, are unstable. If you move slightly away from the exact point, you will tend to move further away. The other two, L4 and L5, are stable. Slight movements around these points will not cause the small body to drift away, but rather orbit around the points. L1, L2, and L3 are located between, behind, and opposite the second of the large bodies, respectively (see figure). L4 and L5 are located in the same orbit as the second large body, 60 degrees ahead and behind it. As the largest planet, Jupiter has the largest collection of asteroids in it's Lagrange points. These asteroids are called the "Jupiter Trojans", since the first few at Jupiter were named after characters in the Trojan War. More generally, objects at the stable Trojan points of other planets are also called Trojans. Since most orbits are elliptical, the Lagrange points shift as the distance between the two major bodies changes.
Rotation
Nearly every natural body in orbit also rotates, so that the direction from the body's center to a fixed surface point changes. This has several effects:
Rotation Period - This is the time it takes the body to complete one rotation with respect to the stars, the Sun, or the planet if it is a satellite of one. The most obvious effect of the rotation period is the day-night cycle on Earth. Some objects become locked into a rotational resonance with the parent body they orbit. This means the rotation period is a simple fraction of the orbit period. When the resonance is 1:1, it is called Tidally Locked, and the Moon is the most obvious example of that. The result is one side always faces the Earth, with a small wobble.
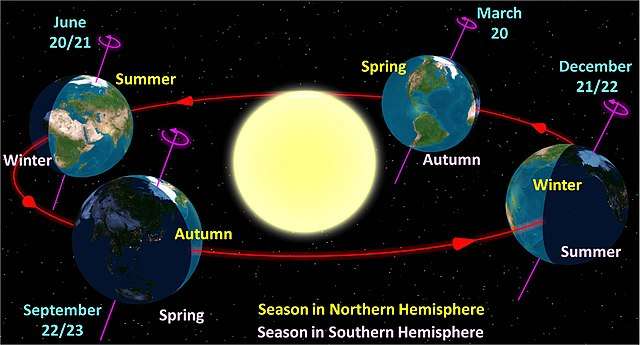
Axial Tilt - Rotation defines an axis of rotation. The places where the axis meets the surface of the body are called poles, and midpoint of the surface between the poles is called the Equator. On smaller bodies with irregular shape, the Equator may not be well defined. On larger bodies which are more or less round, the Equator has the largest distance from the rotation axis. Axial Tilt is the angle the body axis makes with the axis of the body's orbit. The rotational inertia of large bodies causes their rotation axis to remain relatively fixed relative to the stars. For example, the Earth's north pole points near the star Polaris, but this point is tilted 23.44 degrees from the axis of its orbit around the Sun. So it orbits, first one pole, then the other, points towards the Sun, causing seasonal changes (see figure)
Rotational Velocity - When you are on the surface of a rotating body, the circular motion about the axis produces an acceleration which can reduce gravity. The velocity and acceleration depend on the distance from the axis and the rotation period. For example, at the Earth's equator the rotation velocity is 465 m/s, which generates an acceleration of 0.0338 m/s2, or about 3% of gravity. Thus the apparent weight is less at the equator than the poles. Large bodies, more than about 1000 km in diameter, have internal forces greater than the strength of the internal materials. Since rotation lowers gravity in some parts relative to others, the body flows into an ellipsoidal, or flattened, shape. This is called hydrostatic equilibrium. The rotation of any body lowers the difference between orbit velocity and surface velocity when they are in the same direction. In the case of Earth it is 5.9% less, but in the case of some asteroids, like 4 Vesta, it can be 36% lower. Very small objects which do not have structural flaws can even rotate faster than orbital velocity around them, producing regions where you cannot remain on the surface without mechanical aid.
Perturbations
Gravity forces extend to infinity. Therefore nearby large bodies, such as the Moon and Sun for the Earth, also add an acceleration component to the gravity of the Earth. This varies over time as their direction and distance changes. The side of the Earth facing the Moon, for example, is pulled by it's gravity 6.6% more strongly than the opposite side, because it is closer in distance. The difference in gravity between the near and far sides is called the Tidal Force because it is the source of ocean tides on Earth. Those tides happen because water is free to move towards the Moon, but continents are more restricted. Tides do distort the shape of the solid part of the Earth, but less than the oceans. Tidal forces affect other moons and planets too.
The lesser gravity of other bodies also affects the orbit of an object around the primary it is bound to. These are called Perturbations, because they perturb the orbit caused by the strongest gravity force. On long time scales perturbations can drastically affect an orbit. This is most obvious in the case of Jupiter and comets. Long period comets are often near escape velocity, so small velocity changes caused by the large mass of Jupiter can drastically change their orbits. This can lead to them becoming short period comets that stay near the Sun, or being ejected entirely from the Solar System.
Velocity Map
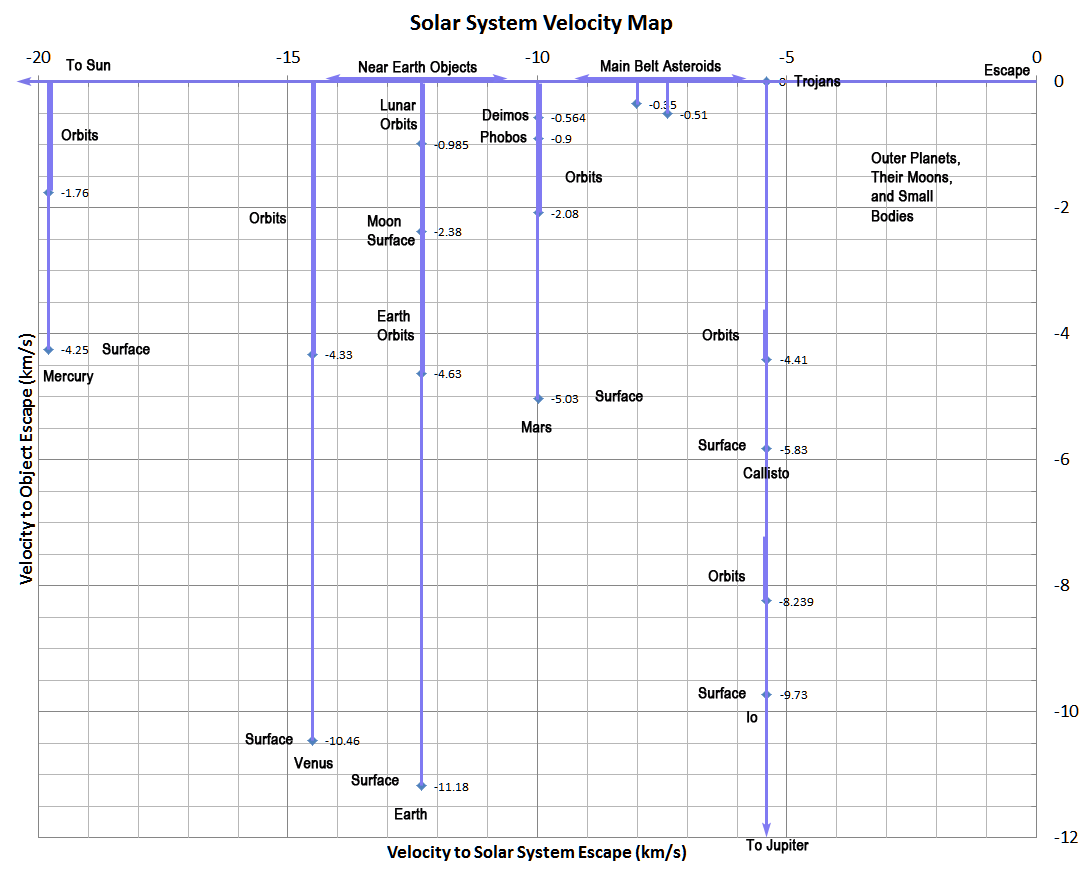
In space, physical distance does not matter as much as velocity, since space is mostly frictionless, and what costs you energy is changing velocity. This graph below shows the minimum ideal velocity relative to escape for the Sun's gravity well on the horizontal axis, and for planetary wells and some satellites and asteroids out to Jupiter on the vertical axis. There is no absolute reference frame against which to measure velocity. We choose escape as the zero point since it has the physical meaning of "to leave this gravity well, you must add this much velocity". Since you must add velocity to leave, the values are negative. If you have more than enough velocity to leave a gravity well, that is called excess velocity, and is measured infinitely far away.
Determining Total Velocity
Total mission velocity is the sum of vertical and horizontal velocity changes on the graph, both in km/s. Note that the axes are different scales. To travel from Earth to Mars, for example, you first have to add velocity to climb out of the Earth's gravity well, add velocity to change orbit within the Sun's gravity well, then subtract velocity to go down Mars' gravity well. On the graph, that means taking the vertical axis velocity change from Earth surface to the top line, which is Solar System orbits (11.18), plus the horizontal segment to go from the Earth's orbit to Mars' orbit (2.3), plus the vertical change to go to the Martian surface (5.03). That gives a total mission velocity of 18.5 km/s, which has to be accounted for by various propulsion systems. To return to Earth, you then reverse the process.
The graph shows theoretical values (single impulse to escape). Real changes in velocity (delta-V) will be higher because (1) maneuvers are not perfectly efficient, (2) orbits are elliptical and inclined, and (3) propulsion systems are not perfectly efficient in performing a given maneuver. Various losses are measured by the difference between ideal velocity, the velocity you would reach in a vacuum with no gravity well present, and the actual velocity you reach in a given circumstance. So this chart is not an exact method for mission planning. It is intended to give a rough estimate as a starting point from which more detailed planning can start.
Velocity Bands
There are two velocity regions on the vertical axis for each planet or satellite. The lower sub-orbital region (thin purple line) is where you have enough velocity to get off the object, but not be in a stable orbit. Those orbits will intersect the body again. So they can be used to travel from point to point on the body's surface, but not to stay in motion for multiple orbits. The higher orbital band, shown with a thicker line, indicates enough velocity for a repeating orbit. The shape of the orbit matters too, but for circular orbits the lowest point in this band is an orbit just above the surface of the body, and the highest point is an orbit just fast enough to escape from it's gravity well.
Since gravity varies as the inverse square of distance, relatively large velocity changes are needed for small altitude changes near the surface of a body. Conversely, near escape velocity, relatively small velocity changes can produce large changes in altitude, and at escape it produces a theoretically infinite change. In reality there are multiple gravity wells that overlap, so escape from Earth merely places you in the larger Solar gravity well, and escape from the Sun places you in the larger gravity well of the Galaxy.
Solar Orbits
The top blue line represents orbits around the Sun away from local gravity wells. The surface of the two largest asteroids, 4 Vesta (-0.35) and 1 Ceres (-0.51) are marked, but the orbital bands for these two asteroids, and the entire gravity well for most smaller asteroids, are too small to show. Instead, the range of Solar velocities are shown for Near Earth Objects and the Main Belt between Mars and Jupiter. In reality the velocities of small objects in the Solar System are spread across the entire chart. The two marked ranges are just of particular interest. The surface of Jupiter and the Sun, and their sub-orbital ranges are off the scale of this chart because of their very deep gravity wells.
Powered Flight
Powered flight refers to trajectories and orbits which are not only under the influence of gravity and other natural forces. Rather they are the result of natural forces plus those created internally by an artificial system, or artificially applied to a system from the outside. The common example of internally created forces is a chemical rocket engine. Examples of outside forces are a powerful laser directed at a lightweight sail, or a gun that uses compressed gas to accelerate a projectile. The powered part of a flight may last a short time, as when a rocket launches into orbit. After that it coasts, only affected by gravity and other natural forces. A solar-electric engine, on the other hand, may operate over most or all of a flight or mission.
Ascent Trajectories
Circular orbit velocity at the earth's surface is 7910 meter/sec. At the equator the Earth rotates eastward at 465 meters/sec. So in theory a transportation system has to provide the difference, or 7445 meters/sec. The Earth's atmosphere causes losses that add to the theoretical velocity increment for many space transportation methods. The design problem is then to find the most efficient trajectory that minimizes losses.
In the case of chemical rockets, they normally fly straight up initially, so as to spend the least amount of time incurring aerodynamic drag. The vertical velocity thus achieved does not contribute to the circular orbit velocity, since they are perpendicular. So an optimized ascent trajectory rather quickly pitches down from vertical towards the horizontal. Just enough climb is used to clear the atmosphere and minimize aerodynamic drag.
The rocket consumes fuel to climb vertically and to overcome drag, so it would achieve a higher final velocity in a drag and gravity free environment. The velocity it would achieve under these conditions is called the 'ideal velocity'. It is this value that the propulsion system is designed to meet. The 'real velocity' is what the rocket actually has left after the drag and gravity effects. These are called drag losses and gee losses respectively. A real rocket has to provide about 9000 meters/sec to reach orbit, so the losses are about 1500 meters/sec, or a 20% penalty.
Boost From a Non-rotating Body
To go from a non-rotating body's surface to orbit requires that a rocket change its velocity from a rest velocity (zero) to a velocity that will keep the payload in orbit. If our rocket maintains a constant thrust during its ascent, then the total velocity change is

where is the acceleration, is the drag, and is the planet's gravitational pull.



Boost From Rotating Body
[To be added]
Mass Ratio: Tsiolkovsky Rocket Equation
For any rocket which expels part of its mass at high velocity to provide acceleration, the total change in velocity delta-v can be found from the exhaust velocity v(e) and the initial and final masses m(0) and m(1) by

The difference between the initial mass m(0) and the final mass m(1) represents the propellant or reaction mass used. The ratio of the initial and final masses is called the Mass Ratio. The final mass consists of the vehicle hardware plus cargo mass. If the cargo mass is set to zero, then a maximum delta-v is reached for the particular technology, and missions that require more than this are impossible.
Staging
A certain fraction of a vehicle's loaded initial mass will be the vehicle's own hardware. Therefore from the above rocket equation there is a maximum velocity it can reach even with zero payload. When the required mission velocity is near or above this point, dropping some of the empty vehicle hardware allows continued flight with a new mass ratio range based on the smaller hardware mass. This is known as Staging, and the components of the vehicle are numbered in order of last use as first stage, second stage, etc. Last use is mentioned because stages can operate in parallel, so the one to be dropped first gets the lower stage number.
The velocity to reach Earth orbit is approximately twice the exhaust velocity of the best liquid fuel mixes in use. So the rocket equation yields a mass ratio of e^2 or 7.39, and a final mass of 13.5%. This percentage is close to the hardware mass of typical designs, so staging has commonly been used with rockets going to Earth Orbit. We desire a rocket with a number of stages that optimizes the economic efficiency (cost per payload unit mass). The economic efficiency depends on a number of factors, the mass efficiency being only one factor.
Let us assume that we desire to launch a payload of weight P. The weight of each stage in the stack is

where is a normalized weight for the stage. The total stack weight is thus


The change of velocity per unit mass for each stage is

where is the ratio of the weight before the burn of the ith stage to the weight after the burn of that stage. Thus, will always have a value greater than 1. The total change in velocity per unit mass for all the stages is then

