Parametric Equations


Polar Coordinates

Sketch the following polar curves without using a computer.



Sketch the following sets of points.


Calculus in Polar Coordinates
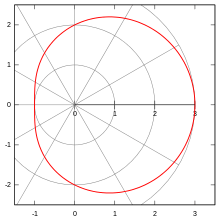
Find points where the following curves have vertical or horizontal tangents.

Vertical tangents occur at points where . This condition is equivalent to .




The condition for a horizontal tangent gives:





Horizontal tangents occur at which correspond to the Cartesian points and .



The condition for a vertical tangent gives:





Vertical tangents occur at which correspond to the Cartesian points and .



Horizontal tangents at (2,2) and (2,-2); vertical tangents at (0,0) and (4,0)

Vertical tangents occur at points where . This condition is equivalent to .

The condition for a horizontal tangent gives:





Horizontal tangents occur at which correspond to the Cartesian points , , , and . Point corresponds to a vertical cusp however and should be excluded leaving , , and .




The condition for a vertical tangent gives:








Vertical tangents occur at which correspond to the Cartesian points , , and .



Horizontal tangents at (r,θ) = (4,π/2), (1,7π/6) and (1,-π/6); vertical tangents at (r,θ) = (3,π/6), (3,5π/6), and (0,3π/2)
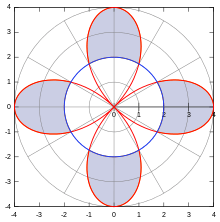
Sketch the region and find its area.



It is first necessary to compute the angular limits of one of the petals. The petals start and end at points where . The bounds on one of the petals are .




![{\displaystyle \left[-{\frac {\pi }{6}},+{\frac {\pi }{6}}\right]}](../../I/m/3c1c4ad280f407a250a7e9003e81c427970c4863.svg)
Given an annular wedge with angle , inner radius , and an outer radius of , the area is . The total area of all 4 petals is therefore .












Vectors and Dot Product
It is already known that the sphere's center is . The sphere's radius is the distance between (1,2,0) and (3,4,5) which is .


Therefore the sphere's equation is: .




Therefore: .



are the unit vectors that are parallel to .





The magnitude of is so the only unit vectors that are orthogonal to are .




The set of possible values of is . The restriction that becomes .






The set of possible and is an ellipse with radii and . One possible parameterization of and is and where . This parameterization yields where as the complete set of unit vectors that are orthogonal to .









Re-parameterizing by letting gives the set

![{\displaystyle \left\langle {\frac {4}{5}}c,-{\frac {3}{5}}c,\pm {\sqrt {1-c^{2}}}\right\rangle ,\ c\in [-1,1]}](../../I/m/087456257f4b52c3bf13601c2a02680a406617d4.svg)


Making a both a clockwise and a counterclockwise rotation of gives






Cross Product
Find and








Find the area of the parallelogram with sides and .


















The magnitude of the torque is . The torque's direction is .


Prove the following identities or show them false by giving a counterexample.



Calculus of Vector-Valued Functions




so the unit tangent vector is


![{\displaystyle \mathbf {r} (t)=\langle \sin(t),\cos(t),e^{-t}\rangle ,\ t\in [0,\pi ]}](../../I/m/a2f30552af99a8f55083220a2960a8a6697bad79.svg)

so the unit tangent vector is


At :










Motion in Space








Length of Curves
Find the length of the following curves.
![{\displaystyle \mathbf {r} (t)=\langle 4\cos(3t),4\sin(3t)\rangle ,\ t\in [0,2\pi /3].}](../../I/m/f3681f0d46ab5bdb85098ee74c0058797105aace.svg)
The total length is therefore:

![{\displaystyle \mathbf {r} (t)=\langle 2+3t,1-4t,3t-4\rangle ,\ t\in [1,6].}](../../I/m/1513778e4cae9f336be929232f7054e2840ec58f.svg)
The total length is therefore:

Parametrization and Normal Vectors
![{\displaystyle \mathbf {r} (t)=\langle t^{2},2t^{2},4t^{2}\rangle \ t\in [1,4].}](../../I/m/9715ec537d31fdc34e2ac352df9235bfa517bc28.svg)
Given an upper bound of , the arc length swept out from to is:
![{\displaystyle u\in [1,4]}](../../I/m/7028583c2cfbfdb6d3bb92e76ba9947380b3a42f.svg)


The arc length spans a range from to . For an arc length of , the upper bound on that generates an arc length of is , and the point at which this upper bound occurs is:


![{\displaystyle s\in [0,15{\sqrt {21}}]}](../../I/m/eb5dd87fcf26f064f70ae02ce3f02e751082141e.svg)





A vector that has the direction of the principal unit normal vector is




Normalizing gives the principal unit normal vector:





Equations of Lines And Planes

The displacement from to , which is , and the displacement from to , which is , are both contained by so the cross product of these two displacements forms a candidate :










Any of , , and is a candidate . Let


The equation becomes




Any vector that is orthogonal to is also orthogonal to and vice versa. Since , the coefficient vector is orthogonal to , so a candidate is .




Since point is contained by , let .


The equation becomes


The equation is equivalent to . This implies that the coefficient vector is orthogonal to the plane defined by . A line that passes through point and is parallel to is parameterized by:





To find as a function of subtract 2 times from to get





To find as a function of subtract from to get




Parameterizing with gives the parameterization

Let be the plane described by and be the plane described by




Since , the coefficient vector is orthogonal to .


Since , the coefficient vector is orthogonal to .


The angle between and is equivalent to the angle between and :







The equation is equivalent to



Letting , the plane consists of all points whose coordinate is . The coordinate of is .





The distance between the plane and the point along the axis is


The distance is the distance between the point and plane along a direction that is orthogonal to the plane, and is hence the shortest distance.

Limits And Continuity
Evaluate the following limits.


At what points is the function f continuous?


Use the two-path test to show that the following limits do not exist. (A path does not have to be a straight line.)




Partial Derivatives



Find the four second partial derivatives of the following functions.

The second derivatives are:


The second derivatives are:

Chain Rule
Find


The chain rule gives:






The chain rule gives:





The chain rule gives:





Find


The chain rule gives:



and



Therefore: and



The chain rule gives:






and





Therefore: and







The chain rule gives:




Tangent Planes
Find an equation of a plane tangent to the given surface at the given point(s).

To linearly extrapolate the condition to a tangent plane at , replace the infinitesimal perturbations , , and with large perturbations , , and to get . Any point in the tangent plane at can be reached by an appropriate choice of , , and where . Any point in the tangent plane at must satisfy .











The point lies in the surface, and the tangent plane is .


The point lies in the surface, and the tangent plane is .


The tangent planes are therefore:


To linearly extrapolate the condition to a tangent plane at , replace the infinitesimal perturbations , , and with large perturbations , , and to get . Any point in the tangent plane at can be reached by an appropriate choice of , , and where . Any point in the tangent plane at must satisfy .



The point lies in the surface, and the tangent plane is .


The point lies in the surface, and the tangent plane is .


The tangent planes are therefore:


To linearly extrapolate the condition to a tangent plane at , replace the infinitesimal perturbations , , and with large perturbations , , and to get . Any point in the tangent plane at can be reached by an appropriate choice of , , and where . Any point in the tangent plane at must satisfy .



The point lies in the surface, and the tangent plane is




To linearly extrapolate the condition to a tangent plane at , replace the infinitesimal perturbations , , and with large perturbations , , and to get . Any point in the tangent plane at can be reached by an appropriate choice of , , and where . Any point in the tangent plane at must satisfy .



The point lies in the surface, and the tangent plane is




Maximum And Minimum Problems
Find critical points of the function f. When possible, determine whether each critical point corresponds to a local maximum, a local minimum, or a saddle point.
Start with a candidate point , and envision that the and coordinates are changing at rates of and respectively: and . The rate of change in is .







- is a local minimum only if for all . This occurs iff .
- is a local maximum only if for all . This occurs iff .




Points where are "critical points" and may contain a local minimum, a local maximum, or a saddle point. It is then needed to classify the critical point.
The second derivative is .



- A critical point is a local minimum iff for all .
- A critical point is a local maximum iff for all .
- A critical point that is neither a local minimum nor a local maximum is a saddle point.


While it will not be shown here, can attain both positive and negative values iff .


- A critical point is a local minimum if and
- A critical point is a local maximum if and
- A critical point is a saddle point if



The quantity will be called the "discriminant".


. Substituting in place of in the first equation gives . This gives the critical points .



The second order derivatives are ; ; and . The discriminant is: .




For critical point , the discriminant is and so is a local minimum.



For critical point , the discriminant is so is a saddle point.

For critical point , the discriminant is and so is a local minimum.

Local minima at (1,1) and (−1,−1), saddle at (0,0)

and . So the only critical point is .



The second order derivatives are ; ; and . The discriminant is






For the critical point , the discriminant is so is a saddle point.

Saddle at (0,0)

. The critical points are .



The second order derivatives are: ; ; and . The discriminant is .





For critical point , the discriminant is so is a saddle point.

For critical points and , the discriminant is and so and are local maximums.




For critical points and , the discriminant is and so and are local minimums.



Saddle at (0,0), local maxima at local minima at


Find absolute maximum and minimum values of the function f on the set R.
Let denote the function for which the absolute minimum and maximum is sought. Let the domain be constrained to all points where where is an appropriate function over .




Start with a candidate point where , and envision that the and coordinates are changing at rates of and respectively: and . The rate of change in is . Since it is required that , it must be the case that .



is a local minimum or maximum only if for all where . This occurs iff the gradient is parallel to the gradient . This condition can be quantified by where factor is a "Lagrange multiplier".






Points where and for some are candidate points for the absolute minimum or maximum. If the domain has any corners, then these corners are also candidate points.

The first order derivatives of are and , so the only critical point where occurs at . This critical point lies in so it remains a valid candidate. .






The first order derivatives of are and . Candidate points assuming the restriction must satisfy for some . These equations are equivalent to . If , then the only restriction left on is and . This gives two candidate points . If , then which is never true. Hence the only valid candidate points derived by restricting the domain to are . and .













In total, the candidates are , , and .
The absolute minimum of occurs at , and the absolute maximum of occurs at .



Maximum of 9 at (0,−2) and minimum of 0 at (0,1)

Candidate points for the absolute minimum and maximum will be derived from 5 sources:
- Critical points of the function assuming an unconstrained domain.
- Candidate points assuming the restriction .
- Candidate points assuming the restriction .
- Candidate points assuming the restriction .
- The vertex points .





The first order derivatives of are and , so the only critical point where is . The critical point lies in so it remains a valid candidate. .



The first order derivatives of are and . Candidate points assuming the restriction must satisfy for some . These equations are equivalent to . This yields the candidate point . Point lies in so it remains a valid candidate. .







The first order derivatives of are and . Candidate points assuming the restriction must satisfy for some . These equations are equivalent to . This yields the candidate point . Point lies in so it remains a valid candidate. .








The first order derivatives of are and . Candidate points assuming the restriction must satisfy for some . The second equation yields . Substituting in place of in the third equation gives . Substituting in place of in the first equation gives , which then yields and . This yields the candidate point . Point lies in so it remains a valid candidate. .











Finally, we add the vertices to the lineup of candidate points.
Evaluating at each candidate point gives ; ; ; ; ; and . The absolute minimum of occurs at , while the absolute maximum of occurs at all of .




Maximum of 0 at (2,0), (0,2), and (0,0); minimum of −2 at (1,1)
Consider two surfaces and in 3D space defined by the equations and respectively. Given a point from and a point from , if and are the points that minimize the distance between and , then it must be the case that the displacement is perpendicular to both surfaces. The gradient vector is orthogonal to , and the gradient vector is orthogonal to . The displacement vector must be parallel to both gradient vectors: for some and .












Candidate points for the shortest distance between two surfaces must satisfy the following 8 equations: for some and .

The second equation gives , and replacing with in the third and forth equations gives and respectively. In the first equation, replacing with and with gives . This gives in turn and .








The only candidate point for the closest distance is , so therefore the point on the plane that is closest to the point is .





The fifth equation is equivalent to , and the eighth equation is equivalent to . Eliminating via substitution and in all of the other equations gives:



If , then and , and then and are the same point which corresponds to an intersection between the surface and the plane. While it will not be shown here, it is relatively simple to show that the surface and plane fail to intersect. Excluding the possibility that , the equations and together imply that ; and the equations and together imply that . The values and give . Hence the point on the surface that is closest to the plane is .














From and , it follows that and . In the equation , eliminating and via substitution gives . Hence and . The corresponding closest point on the plane is .









The closest point on the surface is .

Double Integrals over Rectangular Regions
Evaluate the given integral over the region R.
![{\displaystyle \displaystyle \iint _{R}(x^{2}+xy)dA,\ R=\{(x,y)\mid x\in [1,2],\ y\in [-1,1]\}}](../../I/m/ed365e6e7ddc55551e813614af01d9c10cdc9af6.svg)
![{\displaystyle \displaystyle \iint _{R}(xy\sin(x^{2}))dA,\ R=\{(x,y)\mid x\in [0,{\sqrt {\pi /2}}],\ y\in [0,1]\}}](../../I/m/348d8c966096be3b39bffd752544bc134cb87182.svg)
![{\displaystyle \displaystyle \iint _{R}{\frac {x}{(1+xy)^{2}}}dA,\ R=\{(x,y)\mid x\in [0,4],\ y\in [1,2]\}}](../../I/m/e1d6288e4ccdb0134f6d2546fdd60591316f57ca.svg)
Evaluate the given iterated integrals.


Double Integrals over General Regions
Evaluate the following integrals.




Use double integrals to compute the volume of the given region.


![{\displaystyle R=\{(x,y)\mid y\in [0,1],\ x\in [y,1]\}.}](../../I/m/856d2cf8e1925376bee04c19cab0d5776798d7e3.svg)


Double Integrals in Polar Coordinates

![{\displaystyle R=\{(r,\theta )\mid r\in [1,3],\ \theta \in [0,\pi /2]\}}](../../I/m/bd2b79af3799bfeb6786939cced1210962a85ae2.svg)

![{\displaystyle \{(r,\theta )\mid r\in [2,4]\}.}](../../I/m/0f34d27bc87605d3269e518c127c478a3854701e.svg)


Triple Integrals

In the following exercises, sketching the region of integration may be helpful.

![{\displaystyle y\in [0,\pi ]}](../../I/m/0281fdf747a9247ed8a56221ddd07b34c2a50097.svg)


Cylindrical And Spherical Coordinates

![{\displaystyle D=\{(r,\theta ,z)\mid r\in [0,3],\ z\in [0,2]\}}](../../I/m/b3d5655e4f2397642509c6640400d7087e95cf35.svg)



![{\displaystyle \{(\rho ,\phi ,\theta )\mid \phi \leq \pi /3,\ z\in [0,4]\}}](../../I/m/f200079667c56d8b47444f8062308745eb385015.svg)


Center of Mass and Centroid

![{\displaystyle x\in [0,\pi ].}](../../I/m/6060e8cfe67c32952064ce30d10d000735967451.svg)

![{\displaystyle x\in [0,4].}](../../I/m/246b2cdb5a7eb4ef2a89385af8652d13e75c1afb.svg)




![{\displaystyle \{(x,y)\mid x\in [0,4],y\in [0,2]\}}](../../I/m/9e476dabc9b7a7dfe36cd98372488912496465f7.svg)


Vector Fields
One can sketch two-dimensional vector fields by plotting vector values, flow curves, and/or equipotential curves.







Line Integrals


![{\displaystyle \mathbf {r} (t)=\langle 3\cos(t),3\sin(t),t\rangle ,\ t\in [0,2\pi ]}](../../I/m/0c08e2103ca08229383eb122b8d4d0b8dba3eac9.svg)


![{\displaystyle \mathbf {r} (t)=\langle 4t,t^{2}\rangle ,\ t\in [0,1]}](../../I/m/642cd051fef71427b9ff15e0885d8b70e1d1f344.svg)

Conservative Vector Fields
Determine if the following vector fields are conservative on



Determine if the following vector fields are conservative on their respective domains in When possible, find the potential function.



Green's Theorem



Divergence And Curl









, and then



Surface Integrals




![{\displaystyle z=x^{2}+y^{2},\ z\in [0,4].}](../../I/m/41908c387a7d4b76f5e34372862a7379b14c0707.svg)

![{\displaystyle z^{2}=x^{2}+y^{2},\ z\in [0,1],}](../../I/m/bdef9c8592f3f4001cfc49e3df0f914ece0b10df.svg)

![{\displaystyle y=x^{2},\ z\in [0,4],\ x\in [0,1],}](../../I/m/75190cd1fce58f3ae022e60f9e482de598e957cd.svg)
Stokes' Theorem





where , is the upper half of the ellipsoid , and points in the direction of the z-axis.



where , is the part of the sphere for , and points in the direction of the z-axis.



Divergence Theorem
Compute the net outward flux of the given field across the given surface.











