< ATRIAS 2.1 Handbook < Technical Specifications < Solid Model Specifications < Leg Sub-assembly Mass and Inertia's 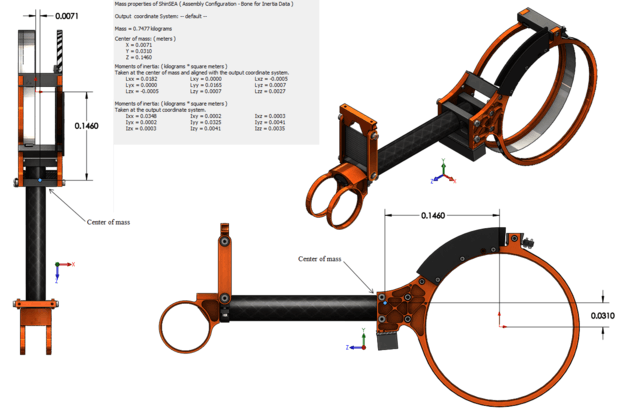
Shin Bone
description of inertial values and mass of this particular robot component of the ATRIAS 2.1 robot built at Oregon State University
| Mass = 0.7477 kilograms |
Center of mass: ( meters )
| X = 0.0071 |
| Y = 0.0310 |
| Z = 0.1460 |
Principal axes of inertia and principal moments of inertia: ( kilograms * square meters )
Taken at the center of mass.
| Ix = (-0.0311, 0.0530, 0.9981) | Px = 0.0026 |
| Iy = (-0.0411, -0.9978, 0.0517) | Py = 0.0165 |
| Iz = (0.9987, -0.0395, 0.0332) | Pz = 0.0182 |
Moments of inertia: ( kilograms * square meters )
Taken at the center of mass and aligned with the output coordinate system.
| Lxx = 0.0182 | Lxy = 0.0000 | Lxz = -0.0005 |
| Lyx = 0.0000 | Lyy = 0.0165 | Lyz = 0.0007 |
| Lzx = -0.0005 | Lzy = 0.0007 | Lzz = 0.0027 |
Moments of inertia: ( kilograms * square meters )
Taken at the output coordinate system.
| Ixx = 0.0348 | Ixy = 0.0002 | Ixz = 0.0003 |
| Iyx = 0.0002 | Iyy = 0.0325 | Iyz = 0.0041 |
| Izx = 0.0003 | Izy = 0.0041 | Izz = 0.0035 |
This article is issued from
Wikibooks.
The text is licensed under Creative
Commons - Attribution - Sharealike.
Additional terms may apply for the media files.