Drive Assembly
Drive Assembly WITH Motor Rotors
Updated: 4/9/2013
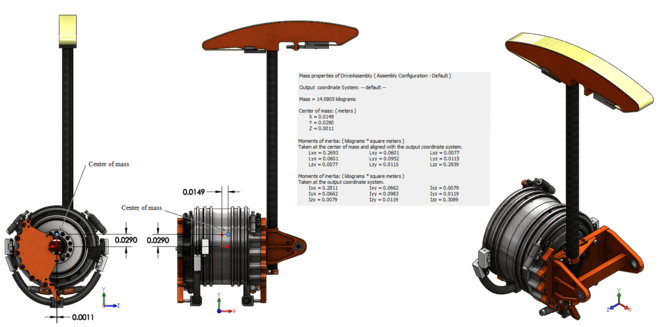
Mass = 14.08053732 kilograms
Center of mass: ( meters )
| X = 0.01491251 |
| Y = 0.02897855 |
| Z = 0.00105929 |
Principal axes of inertia and principal moments of inertia: ( kilograms * square meters ) Taken at the center of mass.
| Ix = (0.29816919, 0.95259188, 0.06052970) | Px = 0.07562156 |
| Iy = (-0.86011725, 0.29563757, -0.41568828) | Py = 0.28624760 |
| Iz = (-0.41387613, 0.07188280, 0.90749072) | Pz = 0.29650450 |
Moments of inertia: ( kilograms * square meters ) Taken at the center of mass and aligned with the output coordinate system.
| Lxx = 0.26927886 | Lxy = 0.06013001 | Lxz = 0.00765377 |
| Lyx = 0.06013001 | Lyy = 0.09517194 | Lyz = 0.01147563 |
| Lzx = 0.00765377 | Lzy = 0.01147563 | Lzz = 0.29392286 |
Moments of inertia: ( kilograms * square meters ) Taken at the output coordinate system.
| Ixx = 0.28111888 | Ixy = 0.06621481 | Ixz = 0.00787620 |
| Iyx = 0.06621481 | Iyy = 0.09831901 | Iyz = 0.01190786 |
| Izx = 0.00787620 | Izy = 0.01190786 | Izz = 0.30887835 |
Drive Assembly WITHOUT Motor Rotors
Updated: 4/9/2013
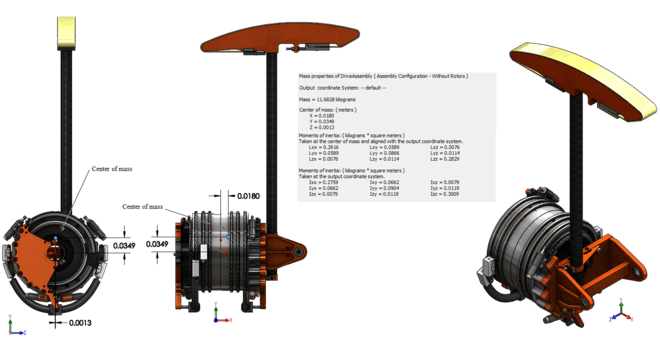
Mass = 11.6828 kilograms
Center of mass: ( meters )
| X = 0.0180 |
| Y = 0.0349 |
| Z = 0.0013 |
Principal axes of inertia and principal moments of inertia: ( kilograms * square meters ) Taken at the center of mass.
| Ix = (0.2924, 0.9544, 0.0609) | Px = 0.0678 |
| Iy = (-0.8094, 0.2809, -0.5157) | Py = 0.2772 |
| Iz = (-0.5093, 0.1015, 0.8546) | Pz = 0.2861 |
Moments of inertia: ( kilograms * square meters ) Taken at the center of mass and aligned with the output coordinate system.
| Lxx = 0.2616 | Lxy = 0.0589 | Lxz = 0.0076 |
| Lyx = 0.0589 | Lyy = 0.0866 | Lyz = 0.0114 |
| Lzx = 0.0076 | Lzy = 0.0114 | Lzz = 0.2829 |
Moments of inertia: ( kilograms * square meters ) Taken at the output coordinate system.
| Ixx = 0.2759 | Ixy = 0.0662 | Ixz = 0.0079 |
| Iyx = 0.0662 | Iyy = 0.0904 | Iyz = 0.0119 |
| Izx = 0.0079 | Izy = 0.0119 | Izz = 0.3009 |
Motor Rotors (Without drive assembly
Updated: 4/9/2013
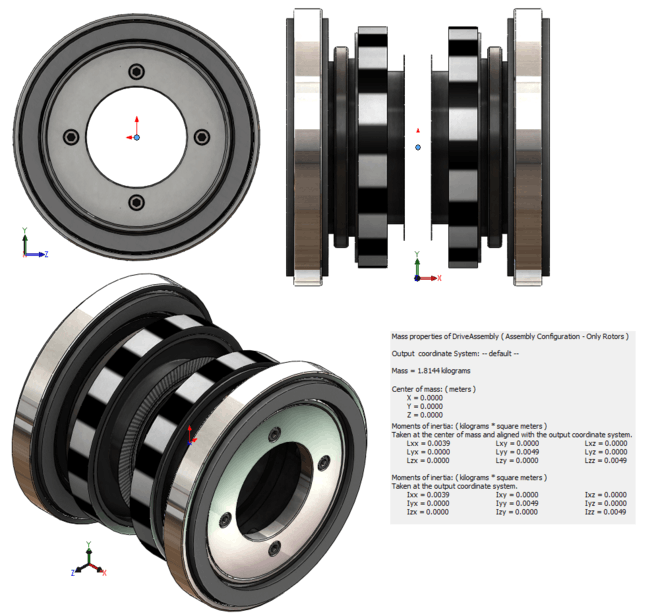
Mass = 1.8144 kilograms
Center of mass: ( meters )
| X = 0.0000 |
| Y = 0.0000 |
| Z = 0.0000 |
Principal axes of inertia and principal moments of inertia: ( kilograms * square meters ) Taken at the center of mass.
| Ix = (1.0000, 0.0000, 0.0000) | Px = 0.0039 |
| Iy = (0.0000, 0.0000, -1.0000) | Py = 0.0049 |
| Iz = (0.0000, 1.0000, 0.0000) | Pz = 0.0049 |
Moments of inertia: ( kilograms * square meters ) Taken at the center of mass and aligned with the output coordinate system.
| Lxx = 0.0039 | Lxy = 0.0000 | Lxz = 0.0000 |
| Lyx = 0.0000 | Lyy = 0.0049 | Lyz = 0.0000 |
| Lzx = 0.0000 | Lzy = 0.0000 | Lzz = 0.0049 |
Moments of inertia: ( kilograms * square meters ) Taken at the output coordinate system.
| Ixx = 0.0039 | Ixy = 0.0000 | Ixz = 0.0000 |
| Iyx = 0.0000 | Iyy = 0.0049 | Iyz = 0.0000 |
| Izx = 0.0000 | Izy = 0.0000 | Izz = 0.0049 |